未知环境下无人机集群协同区域搜索算法
期刊
侯岳奇 男, 硕士研究生。主要研究方向: 航空集群智能决策。
梁晓龙 男, 博士, 教授, 硕士生导师。主要研究方向: 航空集
群指挥与控制、智能系统、空管智能化。
何吕龙 男, 博士研究生。主要研究方向: 航空集群编队控制。
刘流 男, 硕士研究生。主要研究方向: 航空集群编队控制
前言
协同搜索问题:
1,将任务区域进行分割,设计各个子区域的覆盖搜索航
线, 飞行航线固定。该方法的优势在于能够实现任务区域的全覆盖, 而在无人机故障、火力威胁等突发情况下该方法受限。
2,使用笛卡儿栅格描述环境, 赋予每个栅格一个值代表目标分布的不确定性, 设计了搜索回报函数和禁飞区回避
策略。在有先验信息的情况下, 该方法可以实现重点侦察和覆盖搜索。但是假设无人机在相邻栅格之间运动, 这种“粗粒度”的运动模型虽然简化了协同搜索决策的解空间, 但却在一定程度上降低了决策结果的精细程度。
3,基于分布式模型预测控制框架, 采用纳什最优和粒子群优化相结合的算法, 有效地降低了协同搜索决策问题的求解规模和通信负担。虽然上述研究在一定程度上使多无人机具备了协同搜索的能力, 但仍存在区域覆盖率较低的问题。存在这一问题的原因在于: 缺少专门的引导机制, 来引导无人机向未覆盖区域进行搜索。
建模
多无人机协同搜索问题主要分为:在环境信息已知的条件下和在环境信息未知的条件下。
当某架 UAV 出现故障时,传统的离线规划方法难以适应性地完成搜索任务。相比而言, 在线规划方法鲁棒性更强, 在出现突发情况时, 无人机集群能够继续保持协同, 自组织地完成搜索任务。
环境模型
将区域按照固定间隔 Δd 栅格化为 M × N 个栅格,赋予每个栅格一个值 μij ( k) , 用于描述截止到 k 时刻为止栅格( i, j) 是否已被覆盖,构建覆盖分布地图(CDM)来描述任务区域的覆盖分布情况,
无人机模型
将 UAV 视为二维空间中运动的质点,运动方程为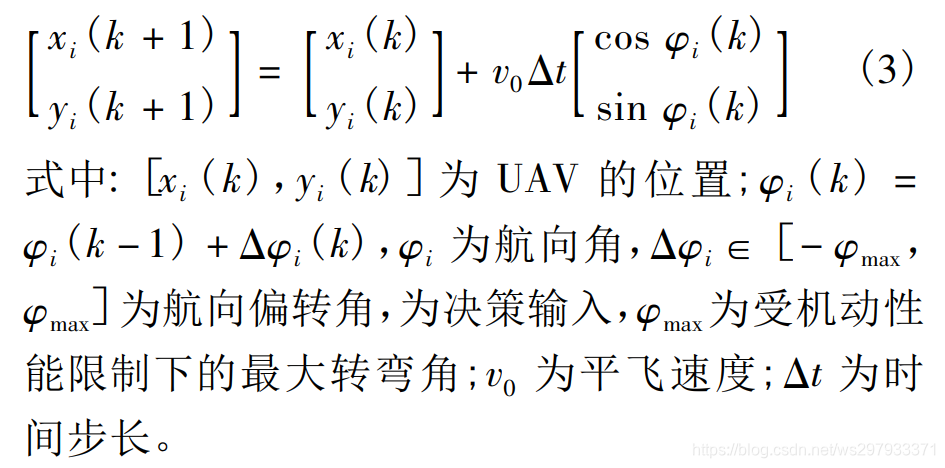
通过运动方程可以求出下时刻无人机的位置,从而进行航路预测,通过优化预测控制输入, 来引导 UAV 尽可能向尚未被覆盖的区域进行搜索, 以获得更高的区域覆盖率。
覆盖地图更新
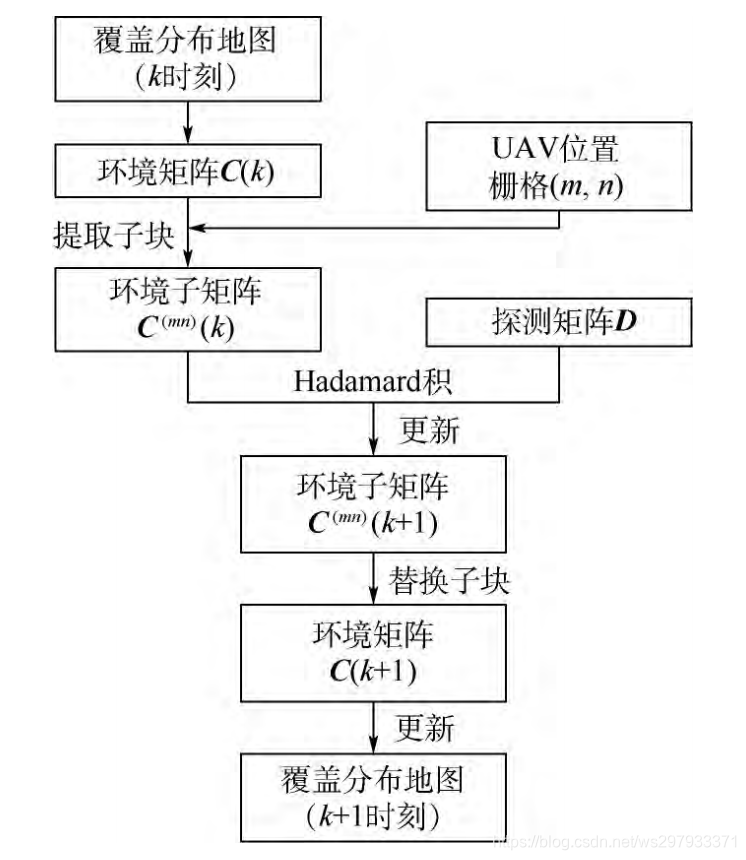
探测矩阵
将探测范围简化为: UAV 所处位置为中心, 半径为 Rs 的圆形区域。
覆盖分布地图的更新

提出基于 Hadamard 积的地图信息融合方法, 能够在一定程度上减小通信中断或数据丢包对搜索过程的影响
奖励函数与搜索算法
奖励的设定主要是一个步长内覆盖率增量的大小, 并依据边界条件和转弯角度设计惩罚函数。
基于 DMPC 和 DE 的协同搜索算法
模 型 预 测 控 制 (MPC) 是一种利用控制系统模型和优化技术设计预测周期内系统最优控制输入的方法, 核心思想是滚动优化求解 。集中式 MPC 方法依赖中央节点进行决策, 限制了系统规模的扩展和决策速度, 在实际应用中有一定局限性。考虑到UAV 子系统之间不存在耦合性, 即不同 UAV 的控制是相对独立的, 它们在系统的动态特性上并没有关联。为提高整个系统的抗毁性和决策速度, 其控制结构可以采用分布式模型预测控制( DMPC ) 方式。
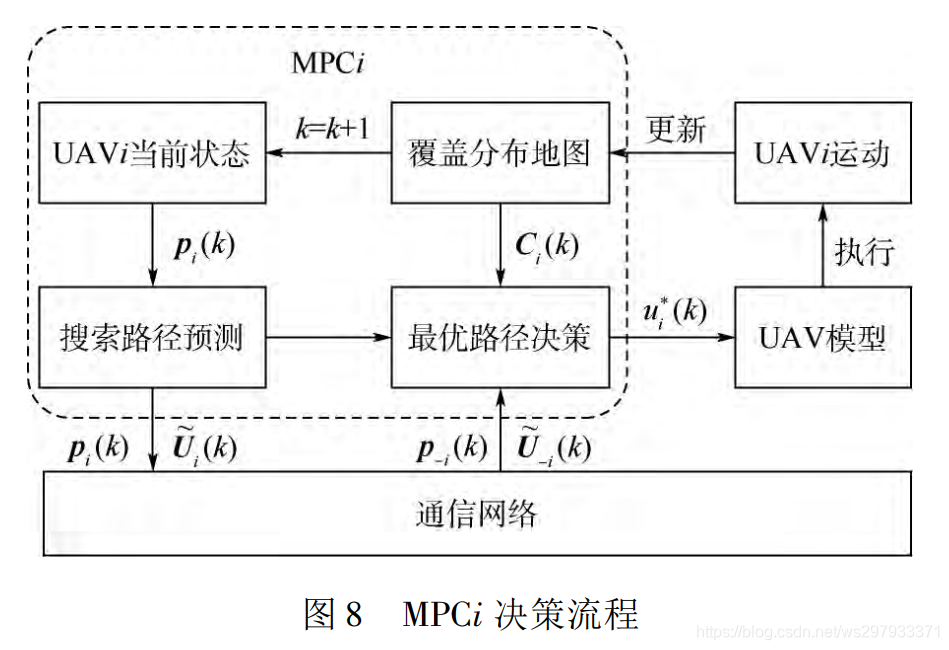
步骤1:预测
在预测阶段, 每架 UAV 基于本地覆盖地图和自身状态进行优化求解, 而不考虑其他 UAV 的运动, 即 UAV 之间不进行协同。
利用差分进化( DE) 算法对上述优化模型进行求解, 即解得 UAVi 的 H步预测控制输入 Ui( k) 。
步骤2:通信
发送自身信息,接受其他无人机信息
步骤3:决策
仿真
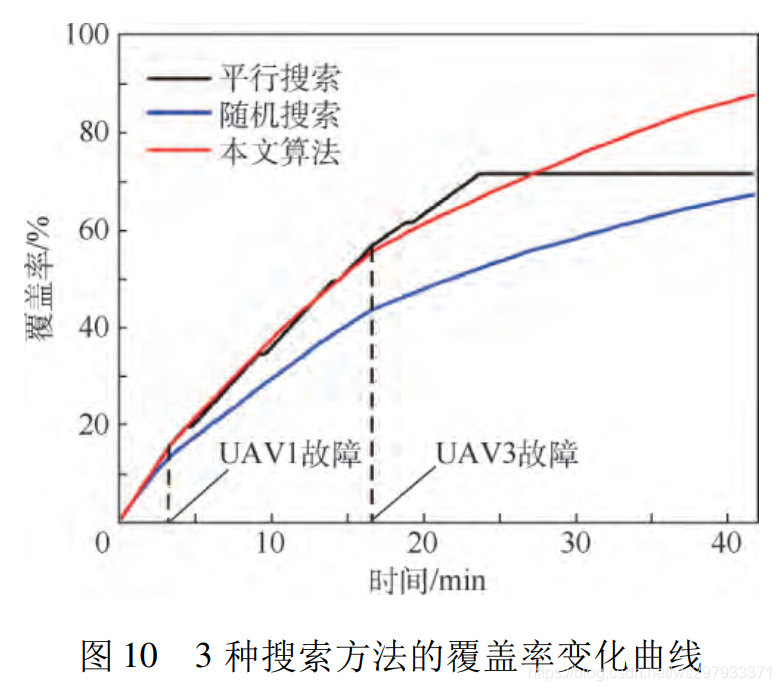
任务环境为无遮挡的平地区域, 任务区域中存在分布未知的火力威胁, 有一定几率造成 UAV 设备故障。在仿真中加入突发情况来模拟这一环境条件: 运行至 20 步长时,假定UAV1 设备故障, 停止执行任务; 运行至 100 步长时, 假定 UAV3设备故障, 停止执行任务。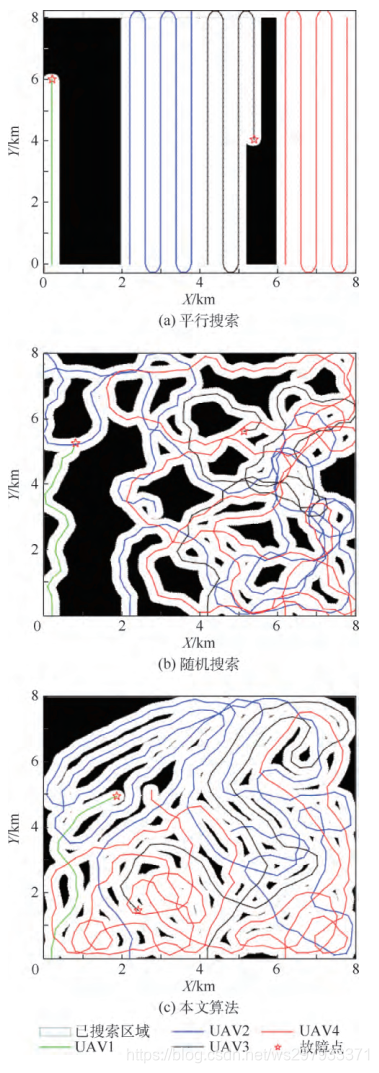
参考文献
HU J W, XU J, XIE L H. Cooperative search and exploration inrobotic networks[J] . Unmanned Systems, 2013, 1 ( 1 ) : 121-142
HU J W, XU J, XIE L H. Vision-based multi-agent cooperativetarget search[C] ∥International Conference on Control, Automation, Robotics & Vision. Piscataway, NJ: IEEE Press, 2012:895-900
区域协同搜索:
吴文超, 黄长强, 宋磊, 等. 不确定环境下的多无人机协同搜索航路规划[J] . 兵工学报, 2011, 32( 11) : 1337-1342
符小卫, 魏广伟, 高晓光. 不确定环境下多无人机协同区域
搜索算法[J] . 系统工程与电子技术, 2016, 38( 4) : 821-827.
彭辉, 沈林成, 朱华勇. 基于分布式模型预测控制的多 UAV协同区域搜索[J] . 航空学报, 2010, 31( 3) : 593-601
TRODDEN P, RICHARDS A. Multi-vehicle cooperative searchusing distributed model predictive control[C] ∥ Guidance,Navigation, and Control Conference and Exhibit. Reston: AIAA,2008: 1-11.
提出了一种地图信息融合更新方法
刘重, 高晓光, 符小卫. 带信息素回访机制的多无人机分布式协同目标搜索[J] . 系统工程与电子技术, 2017, 39( 9) :1998-2011.
DMPC
MAYNE D Q. Model predictive control: Recent developmentsand future promise [ J] . Automatica, 2014, 50 ( 12 ) :2967-2986.
KAYACAN E, PESCHEL J M, KAYACAN E. Centralized, decentralized and distributed nonlinear model predictive control ofa tractor-trailer system: A comparative study[C] ∥2016 American Control Conference.Piscataway, NJ: IEEE Press, 2016:4403-4408
MANSOURI S S, NIKOLAKOPOULOS G, GUSTAFSSON T.Distributed model predictive control for unmanned aerial vehicles[C] ∥2015 Workshop on Research, Education and Development of Unmanned Aerial Systems Piscataway, NJ: IEEEPress, 2015: 152-161
DE
DAS S, MULLICK S S, SUGANTHAN P N. Recent advances indifferential evolution—An updated survey[J] . Swarm and Evolutionary Computation, 2016, 27: 1-29.
来源:CSDN
作者:JeremyAhhh
链接:https://blog.csdn.net/ws297933371/article/details/104788737