PnP算法大体分为直接法和优化法
常见的直接法包括:P3P、DLT、EPnP
优化的算法包括:LHM、Only pos BA
PnP算法的指标主要包括:匹配点数、鲁棒性、速度、精度
P3P:3对匹配点,需要相机内参
DLT:不需要内参,4点法求出单应矩阵,DLT分解出K、R、T
EPnP:最少4个点,性价比高,精度较高,需要内参K
LHM:复杂度较高,具有全局凸性,收敛性好,精度高。(在物体坐标系建立误差模型)
Only pos BA:复杂度高,需要初始解,精度高。(在图像坐标系建立误差模型)
EPnP算法
EPnP与P3P等直接法主要有两个步骤:
1.利用刚体结构不变性,得到机体坐标系下的3D点坐标(但是欠尺度)
2.根据世界坐标系和机体坐标系对应的3D点求解R、T
2D --> 3D(欠尺度)–> ICP --> R、T
EPnP最大的特点:
1.用世界坐标系/机体坐标系下4个控制点(原点+三个方向点)表示所有世界坐标系/机体坐标系下的3D点
2.再最小二乘求解后使用高斯牛顿法优化控制点提高精度
步骤
1.根据世界坐标系下的3D点,用四个控制点构建质心坐标系
2.使用4个控制点构建的质心坐标系表示每一个点、
3.求解机体坐标系下控制点
4.确定N的数值和(控制点间距离不变性)恢复x的尺度
DLT分解法
给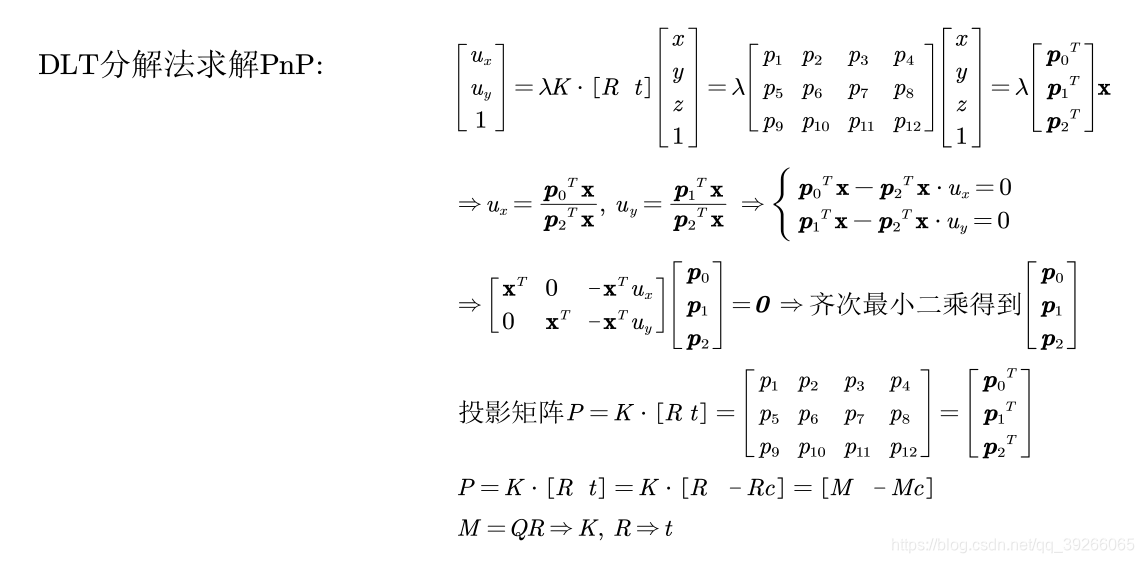
来源:CSDN
作者:秃头队长
链接:https://blog.csdn.net/qq_39266065/article/details/104253719