CNN从2012年的AlexNet发展至今,科学家们发明出各种各样的CNN模型,一个比一个深,一个比一个准确,一个比一个轻量。我下面会对近几年一些具有变革性的工作进行简单盘点,从这些充满革新性的工作中探讨日后的CNN变革方向。
注:水平所限,下面的见解或许有偏差,望大牛指正。另外只介绍其中具有代表性的模型,一些著名的模型由于原理相同将不作介绍,若有遗漏也欢迎指出。
一、卷积只能在同一组进行吗?-- Group convolution
Group convolution 分组卷积,最早在AlexNet中出现,由于当时的硬件资源有限,训练AlexNet时卷积操作不能全部放在同一个GPU处理,因此作者把feature maps分给多个GPU分别进行处理,最后把多个GPU的结果进行融合。
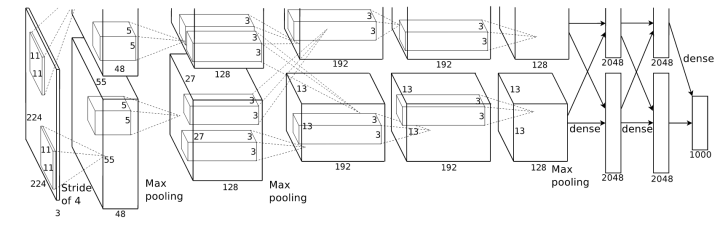
alexnet
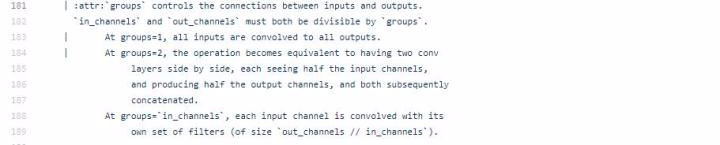
分组卷积的思想影响比较深远,当前一些轻量级的SOTA(State Of The Art)网络,都用到了分组卷积的操作,以节省计算量。但题主有个疑问是,如果分组卷积是分在不同GPU上的话,每个GPU的计算量就降低到 1/groups,但如果依然在同一个GPU上计算,最终整体的计算量是否不变?找了pytorch上有关组卷积操作的介绍,望读者解答我的疑问。
pytroch github
EDIT:
关于这个问题,知乎用户朋友
提出了他的见解:我感觉group conv本身应该就大大减少了参数,比如当input channel为256,output channel也为256,kernel size为3*3,不做group conv参数为256*3*3*256,若group为8,每个group的input channel和output channel均为32,参数为8*32*3*3*32,是原来的八分之一。这是我的理解。
我的理解是分组卷积最后每一组输出的feature maps应该是以concatenate的方式组合,而不是element-wise add,所以每组输出的channel是 input channels / #groups,这样参数量就大大减少了。
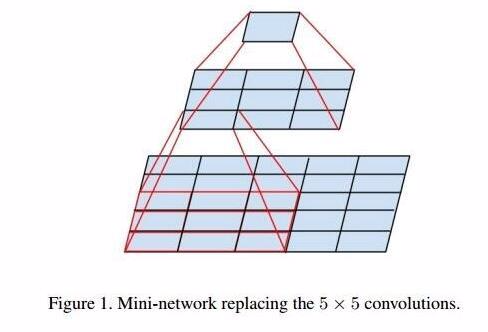
二、卷积核一定越大越好?-- 3×3卷积核
AlexNet中用到了一些非常大的卷积核,比如11×11、5×5卷积核,之前人们的观念是,卷积核越大,receptive field(感受野)越大,看到的图片信息越多,因此获得的特征越好。虽说如此,但是大的卷积核会导致计算量的暴增,不利于模型深度的增加,计算性能也会降低。于是在VGG(最早使用)、Inception网络中,利用2个3×3卷积核的组合比1个5×5卷积核的效果更佳,同时参数量(3×3×2+1 VS 5×5×1+1)被降低,因此后来3×3卷积核被广泛应用在各种模型中。
三、每层卷积只能用一种尺寸的卷积核?-- Inception结构
传统的层叠式网络,基本上都是一个个卷积层的堆叠,每层只用一个尺寸的卷积核,例如VGG结构中使用了大量的3×3卷积层。事实上,同一层feature map可以分别使用多个不同尺寸的卷积核,以获得不同尺度的特征,再把这些特征结合起来,得到的特征往往比使用单一卷积核的要好,谷歌的GoogleNet,或者说Inception系列的网络,就使用了多个卷积核的结构:

最初版本的Inception结构
如上图所示,一个输入的feature map分别同时经过1×1、3×3、5×5的卷积核的处理,得出的特征再组合起来,获得更佳的特征。但这个结构会存在一个严重的问题:参数量比单个卷积核要多很多,如此庞大的计算量会使得模型效率低下。这就引出了一个新的结构:
四、怎样才能减少卷积层参数量?-- Bottleneck
发明GoogleNet的团队发现,如果仅仅引入多个尺寸的卷积核,会带来大量的额外的参数,受到Network In Network中1×1卷积核的启发,为了解决这个问题,他们往Inception结构中加入了一些1×1的卷积核,如图所示:
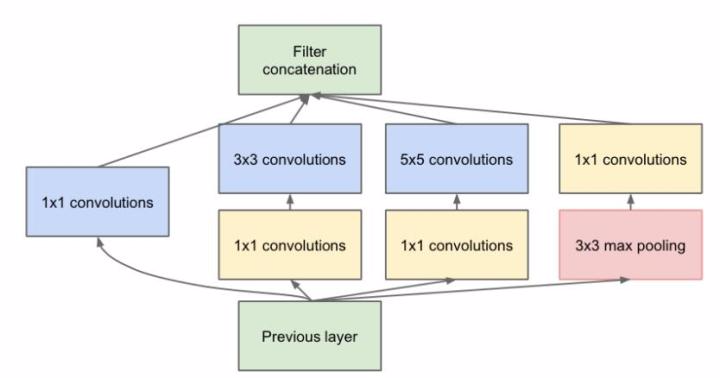
加入1×1卷积核的Inception结构
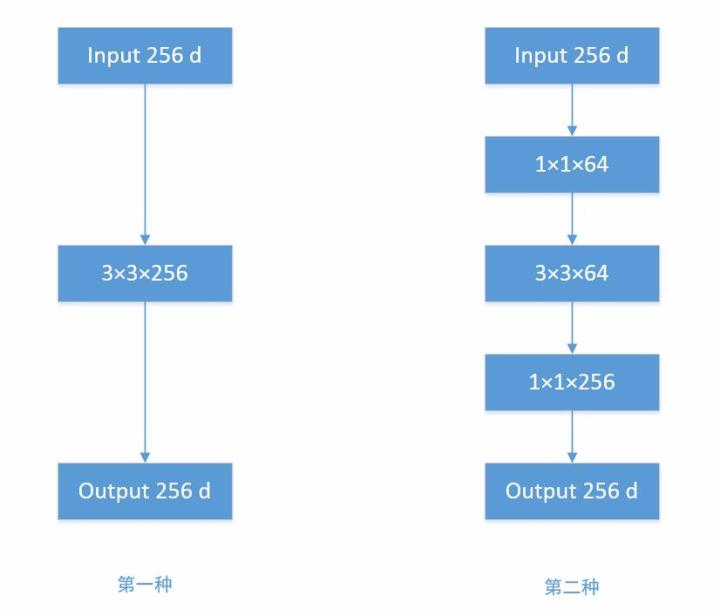
根据上图,我们来做个对比计算,假设输入feature map的维度为256维,要求输出维度也是256维。有以下两种操作:
- 256维的输入直接经过一个3×3×256的卷积层,输出一个256维的feature map,那么参数量为:256×3×3×256 = 589,824
- 256维的输入先经过一个1×1×64的卷积层,再经过一个3×3×64的卷积层,最后经过一个1×1×256的卷积层,输出256维,参数量为:256×1×1×64 + 64×3×3×64 + 64×1×1×256 = 69,632。足足把第一种操作的参数量降低到九分之一!
1×1卷积核也被认为是影响深远的操作,往后大型的网络为了降低参数量都会应用上1×1卷积核。
五、越深的网络就越难训练吗?-- Resnet残差网络
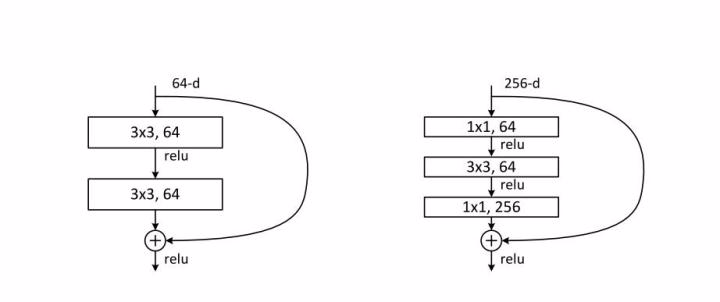
ResNet skip connection
传统的卷积层层叠网络会遇到一个问题,当层数加深时,网络的表现越来越差,很大程度上的原因是因为当层数加深时,梯度消散得越来越严重,以至于反向传播很难训练到浅层的网络。为了解决这个问题,何凯明大神想出了一个“残差网络”,使得梯度更容易地流动到浅层的网络当中去,而且这种“skip connection”能带来更多的好处,这里可以参考一个PPT:极深网络(ResNet/DenseNet): Skip Connection为何有效及其它 ,以及我的一篇文章:为什么ResNet和DenseNet可以这么深?一文详解残差块为何能解决梯度弥散问题。 ,大家可以结合下面的评论进行思考。
六、卷积操作时必须同时考虑通道和区域吗?-- DepthWise操作
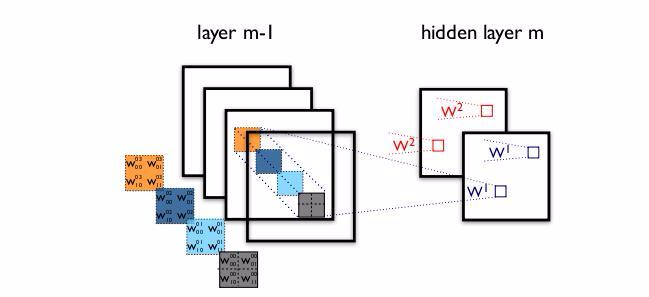
标准的卷积过程可以看上图,一个2×2的卷积核在卷积时,对应图像区域中的所有通道均被同时考虑,问题在于,为什么一定要同时考虑图像区域和通道?我们为什么不能把通道和空间区域分开考虑?
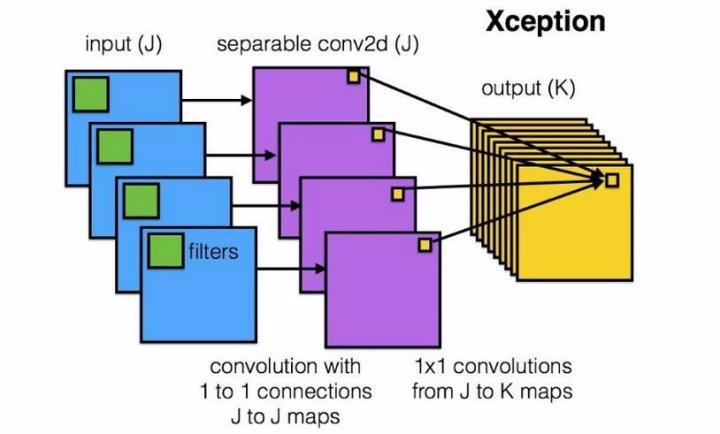
Xception网络就是基于以上的问题发明而来。我们首先对每一个通道进行各自的卷积操作,有多少个通道就有多少个过滤器。得到新的通道feature maps之后,这时再对这批新的通道feature maps进行标准的1×1跨通道卷积操作。这种操作被称为 “DepthWise convolution” ,缩写“DW”。
这种操作是相当有效的,在imagenet 1000类分类任务中已经超过了InceptionV3的表现,而且也同时减少了大量的参数,我们来算一算,假设输入通道数为3,要求输出通道数为256,两种做法:
1.直接接一个3×3×256的卷积核,参数量为:3×3×3×256 = 6,912
2.DW操作,分两步完成,参数量为:3×3×3 + 3×1×1×256 = 795,又把参数量降低到九分之一!
因此,一个depthwise操作比标准的卷积操作降低不少的参数量,同时论文中指出这个模型得到了更好的分类效果。
EDIT:2017.08.25
本文在发出12小时后,一位知乎用户私信了我,向我介绍了Depthwise和Pointwise的历史工作,而Xception和Mobilenet也引用了他们16年的工作,就是Min Wang et al 的Factorized Convolutional Neural Networks,这篇论文的Depthwise中,每一通道输出的feature map(称为“基层”)可以不止一个,而Xception中的Depthwise separable Convolution, 正是这篇工作中“单一基层”的情况。推荐有兴趣的读者关注下他们的工作,这里有篇介绍博文:【深度学习】卷积层提速Factorized Convolutional Neural Networks。而最早关于separable convolution的介绍,Xception作者提到,应该追溯到Lau- rent Sifre 2014年的工作 Rigid-Motion Scattering For Image Classification 6.2章节。
七、分组卷积能否对通道进行随机分组?-- ShuffleNet
在AlexNet的Group Convolution当中,特征的通道被平均分到不同组里面,最后再通过两个全连接层来融合特征,这样一来,就只能在最后时刻才融合不同组之间的特征,对模型的泛化性是相当不利的。为了解决这个问题,ShuffleNet在每一次层叠这种Group conv层前,都进行一次channel shuffle,shuffle过的通道被分配到不同组当中。进行完一次group conv之后,再一次channel shuffle,然后分到下一层组卷积当中,以此循环。
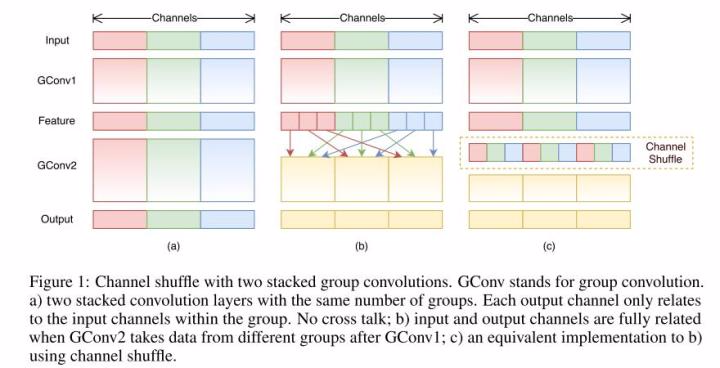
来自ShuffleNet论文
经过channel shuffle之后,Group conv输出的特征能考虑到更多通道,输出的特征自然代表性就更高。另外,AlexNet的分组卷积,实际上是标准卷积操作,而在ShuffleNet里面的分组卷积操作是depthwise卷积,因此结合了通道洗牌和分组depthwise卷积的ShuffleNet,能得到超少量的参数以及超越mobilenet、媲美AlexNet的准确率!
另外值得一提的是,微软亚洲研究院MSRA最近也有类似的工作,他们提出了一个IGC单元(Interleaved Group Convolution),即通用卷积神经网络交错组卷积,形式上类似进行了两次组卷积,Xception 模块可以看作交错组卷积的一个特例,特别推荐看看这篇文章:王井东详解ICCV 2017入选论文:通用卷积神经网络交错组卷积
要注意的是,Group conv是一种channel分组的方式,Depthwise +Pointwise是卷积的方式,只是ShuffleNet里面把两者应用起来了。因此Group conv和Depthwise +Pointwise并不能划等号。
八、通道间的特征都是平等的吗? -- SEnet
无论是在Inception、DenseNet或者ShuffleNet里面,我们对所有通道产生的特征都是不分权重直接结合的,那为什么要认为所有通道的特征对模型的作用就是相等的呢? 这是一个好问题,于是,ImageNet2017 冠军SEnet就出来了。
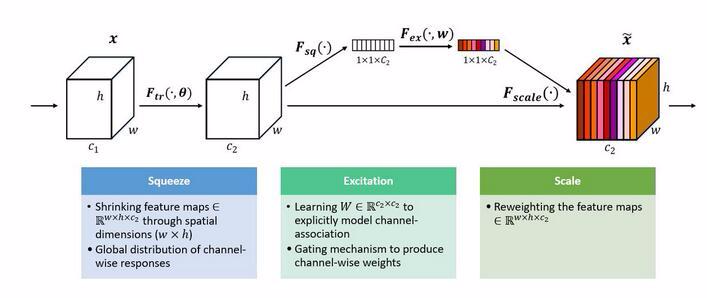
SEnet 结构
一组特征在上一层被输出,这时候分两条路线,第一条直接通过,第二条首先进行Squeeze操作(Global Average Pooling),把每个通道2维的特征压缩成一个1维,从而得到一个特征通道向量(每个数字代表对应通道的特征)。然后进行Excitation操作,把这一列特征通道向量输入两个全连接层和sigmoid,建模出特征通道间的相关性,得到的输出其实就是每个通道对应的权重,把这些权重通过Scale乘法通道加权到原来的特征上(第一条路),这样就完成了特征通道的权重分配。作者详细解释可以看这篇文章:专栏 | Momenta详解ImageNet 2017夺冠架构SENet
九、能否让固定大小的卷积核看到更大范围的区域?-- Dilated convolution
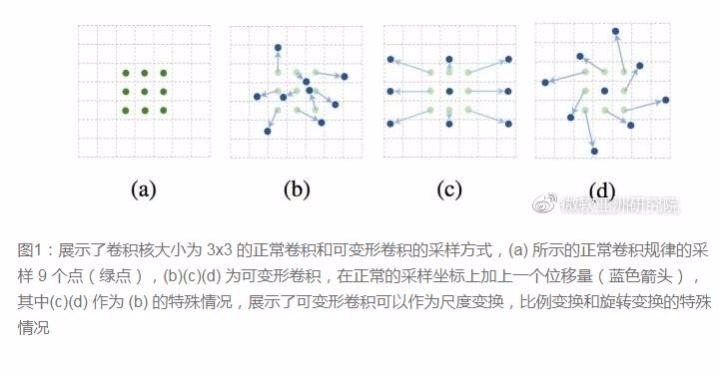
标准的3×3卷积核只能看到对应区域3×3的大小,但是为了能让卷积核看到更大的范围,dilated conv使其成为了可能。dilated conv原论文中的结构如图所示:

上图b可以理解为卷积核大小依然是3×3,但是每个卷积点之间有1个空洞,也就是在绿色7×7区域里面,只有9个红色点位置作了卷积处理,其余点权重为0。这样即使卷积核大小不变,但它看到的区域变得更大了。详细解释可以看这个回答:如何理解空洞卷积(dilated convolution)?
十、卷积核形状一定是矩形吗?-- Deformable convolution 可变形卷积核
图来自微软亚洲研究院公众号
传统的卷积核一般都是长方形或正方形,但MSRA提出了一个相当反直觉的见解,认为卷积核的形状可以是变化的,变形的卷积核能让它只看感兴趣的图像区域 ,这样识别出来的特征更佳。
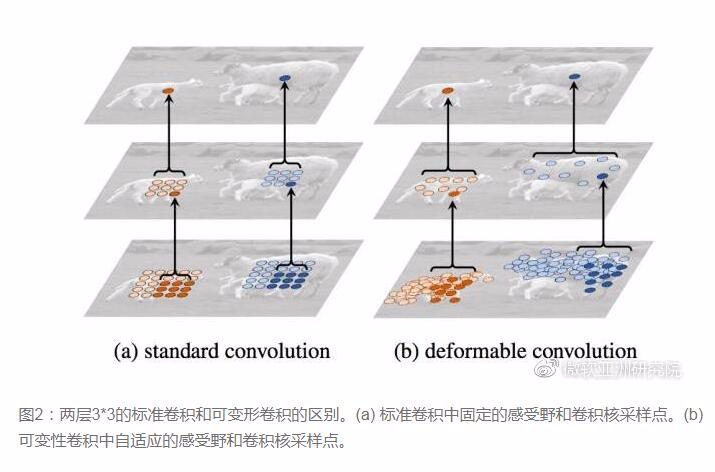
图来自微软亚洲研究院公众号要做到这个操作,可以直接在原来的过滤器前面再加一层过滤器,这层过滤器学习的是下一层卷积核的位置偏移量(offset),这样只是增加了一层过滤器,或者直接把原网络中的某一层过滤器当成学习offset的过滤器,这样实际增加的计算量是相当少的,但能实现可变形卷积核,识别特征的效果更好。详细MSRA的解读可以看这个链接:可变形卷积网络:计算机新“视”界。
启发与思考
现在越来越多的CNN模型从巨型网络到轻量化网络一步步演变,模型准确率也越来越高。现在工业界追求的重点已经不是准确率的提升(因为都已经很高了),都聚焦于速度与准确率的trade off,都希望模型又快又准。因此从原来AlexNet、VGGnet,到体积小一点的Inception、Resnet系列,到目前能移植到移动端的mobilenet、ShuffleNet(体积能降低到0.5mb!),我们可以看到这样一些趋势:
卷积核方面:
- 大卷积核用多个小卷积核代替;
- 单一尺寸卷积核用多尺寸卷积核代替;
- 固定形状卷积核趋于使用可变形卷积核;
- 使用1×1卷积核(bottleneck结构)。
卷积层通道方面:
- 标准卷积用depthwise卷积代替;
- 使用分组卷积;
- 分组卷积前使用channel shuffle;
- 通道加权计算。
卷积层连接方面:
- 使用skip connection,让模型更深;
- densely connection,使每一层都融合上其它层的特征输出(DenseNet)
启发
类比到通道加权操作,卷积层跨层连接能否也进行加权处理?bottleneck + Group conv + channel shuffle + depthwise的结合会不会成为以后降低参数量的标准配置?
如果你有更多的想法或意见,欢迎评论留言,好的idea值得交流传播。