EEE 1588将整个网络内的时钟分为两种,即普通时钟(Ordinary Clock,OC)和边界时钟(Boundary Clock,BC),只有一个PTP通信端口的时钟是普通时钟,有一个以上PTP通信端口的时钟是边界时钟,每个PTP端口提供独立的PTP通信。其中,边界时钟通常用在确定性较差的网络设备(如交换机和路由器)上。从通信关系上又可把时钟分为主时钟和从时钟,理论上任何时钟都能实现主时钟和从时钟的功能,但一个PTP通信子网内只能有一个主时钟。整个系统中的最优时钟为最高级时钟GMC(Grandmaster Clock),有着最好的稳定性、精确性、确定性等。根据各节点上时钟的精度和级别以及UTC(通用协调时间)的可追溯性等特性,由最佳主时钟算法(Best Master Clock)来自动选择各子网内的主时钟;在只有一个子网的系统中,主时钟就是最高级时钟GMC。每个系统只有一个GMC,且每个子网内只有一个主时钟,从时钟与主时钟保持同步。图1所示的是一个典型的主时钟、从时钟关系示意。
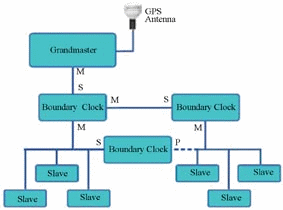
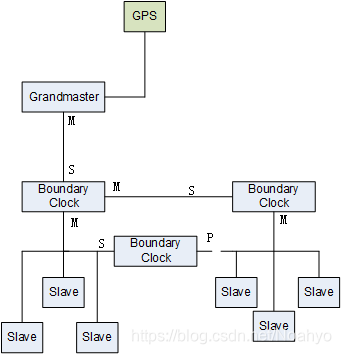
图1 主时钟、从时钟关系示意图
同步的基本原理包括时间发出和接收时间信息的记录,并且对每一条信息增加一个“时间戳”。有了时间记录,接收端就可以计算出自己在网络中的时钟误差和延时。为了管理这些信息,PTP协议定义了4种多点传送的报文类型和管理报文,包括同步报文(Sync),跟随报文(Follow_up),延迟请求报文(Delay_Req),延迟应答报文(Delay_Resp)。这些报文的交互顺序如图2所示。收到的信息回应是与时钟当前的状态有关的。同步报文是从主时钟周期性发出的(一般为每两秒一次),它包含了主时钟算法所需的时钟属性。总的来说同步报文包含了一个时间戳,精确地描述了数据包发出的预计时间
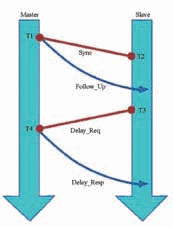
图2 PTP报文与交换顺序
由于同步报文包含的是预计的发出时间而不是真实的发出时间,所以Sync报文的真实发出时间被测量后在随后的Follow_Up报文中发出。Sync报文的接收方记录下真实的接收时间。使用Follow_Up报文中的真实发出时间和接收方的真实接收时间,可以计算出从属时钟与主时钟之间的时差,并据此更正从属时钟的时间。但是此时计算出的时差包含了网络传输造成的延时,所以使用Delay_Req报文来定义网络的传输延时。
Delay_Req报文在Sync报文收到后由从属时钟发出。与Sync报文一样,发送方记录准确的发送时间,接收方记录准确的接收时间。准确的接收时间包含在Delay_Resp报文中,从而计算出网络延时和时钟误差。同步的精确度与时间戳和时间信息紧密相关。纯软件的方案可以达到毫秒的精度,软硬件结合的方案可以达到微秒的精度。
PTP协议基于同步数据包被传播和接收时的最精确的匹配时间,每个从时钟通过与主时钟交换同步报文而与主时钟达到同步。这个同步过程分为漂移测量阶段和偏移测量与延迟测量阶段。
第一阶段修正主时钟与从时钟之间的时间偏差,称为漂移测量。如图3所示,在修正漂移量的过程中,主时钟按照定义的间隔时间(缺省是2s)周期性地向相应的从时钟发出惟一的同步报文。这个同步报文包括该报文离开主时钟的时间估计值。主时钟测量传递的准确时间T0 K,从时钟测量接收的准确时间T1 K。之后主时钟发出第二条报文——跟随报文(Follow_up Message),此报文与同步报文相关联,且包含同步报文放到PTP通信路径上的更为精确的估计值。这样,对传递和接收的测量与标准时间戳的传播可以分离开来。从时钟根据同步报文和跟随报文中的信息来计算偏移量,然后按照这个偏移量来修正从时钟的时间,如果在传输路径中没有延迟,那么两个时钟就会同步。
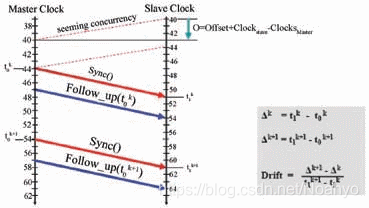
图3 PTP时钟漂移测量计算
为了提高修正精度,可以把主时钟到从时钟的报文传输延迟等待时间考虑进来,即延迟测量,这是同步过程的第二个阶段(见图4)。
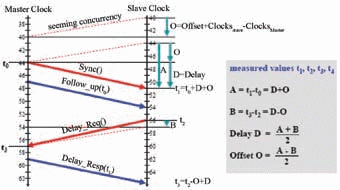
从时钟向主时钟发出一个“延迟请求”数据报文,在这个过程中决定该报文传递准确时间T2。主时钟对接收数据包打上一个时间戳,然后在“延迟响应”数据包中把接收时间戳B送回到从时钟。根据传递时间戳B和主时钟提供的接收时间戳D,从时钟计算与主时钟之间的延迟时间。与偏移测量不同,延迟测量是不规则进行的,其测量间隔时间(缺省值是4~60s之间的随机值)比偏移值测量间隔时间要大。这样使得网络尤其是设备终端的负荷不会太大。采用这种同步过程,可以消减PTP协议栈中的时间波动和主从时钟间的等待时间。从图4右边可以看延迟时间D 和偏移时间数值O的计算方法。
IEEE 1588目前的版本是v2.2,主要应用于相对本地化、网络化的系统,内部组件相对稳定,其优点是标准非常具有代表性,并且是开放式的。由于它的开放性,特别适合于以太网的网络环境。与其他常用于Ethernet TCP/IP网络的同步协议如SNTP或NTP相比,主要区别是PTP是针对更稳定和更安全的网络环境设计的,所以更为简单,占用的网络和计算资源也更少。NTP协议是针对于广泛分散在互联网上的各个独立系统的时间同步协议。GPS(基于卫星的全球定位系统)也是针对于分散广泛且各自独立的系统。PTP定义的网络结构可以使自身达到很高的精度,与SNTP和NTP相反,时间戳更容易在硬件上实现,并且不局限于应用层,这使得PTP可以达到微秒以内的精度。此外,PTP模块化的设计也使它很容易适应低端设备。
IEEE1588标准所定义的精确网络同步协议实现了网络中的高度同步,使得在分配控制工作时无需再进行专门的同步通信,从而达到了通信时间模式与应用程序执行时间模式分开的效果。
来源:CSDN
作者:Noahyo
链接:https://blog.csdn.net/Noahyo/article/details/104836376