一、概序:
前文已经介绍了camera驱动部分的内容Camera4 MTK camera驱动结构介绍,这里在回顾下之前的框架图,
这篇主要介绍红框部分的内容:
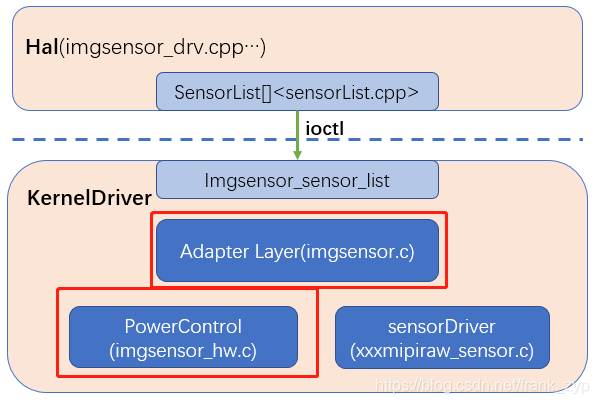
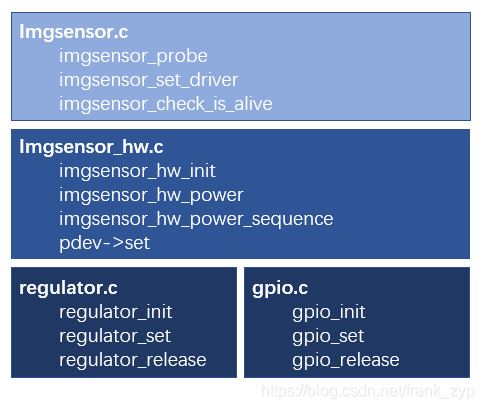
imgsensor起到承上启下的作用,在系统起来时会创建整个camera驱动运行的环境,其中主要的
文件和函数如下框图所示,先设备挂载时会调用注册platform设备platform_driver_register,在匹配成
功后会调用probe函数进行初始相关的设备:
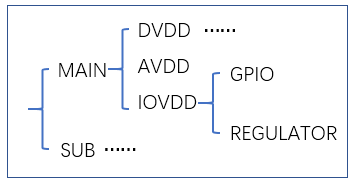
其中camera的三路电压的上电方式可以通过GPIO来控制,也可以通过PMIC(REGULATOR)的方式来
进行控制,在imgsensor_hw中通过不同的pdev信息,调用不同的set函数。涉及的文件路径:
kernel-4.9/drivers/misc/mediatek/imgsensor/src/common/v1/imgsensor.c
kernel-4.9/drivers/misc/mediatek/imgsensor/src/common/v1/imgsensor_hw.c
kernel-4.9/drivers/misc/mediatek/imgsensor/src/mt6765/camera_hw/regulator/regulator.c
kernel-4.9/drivers/misc/mediatek/imgsensor/src/mt6765/camera_hw/gpio/gpio.c
二、上电相关的结构体之间的联系:
(1)IMGSENSOR_HW结构体:
IMGSENSOR_HW结构体包含了pdev(gpio/regulator)的设备结构体和上电时序相关的结构体:
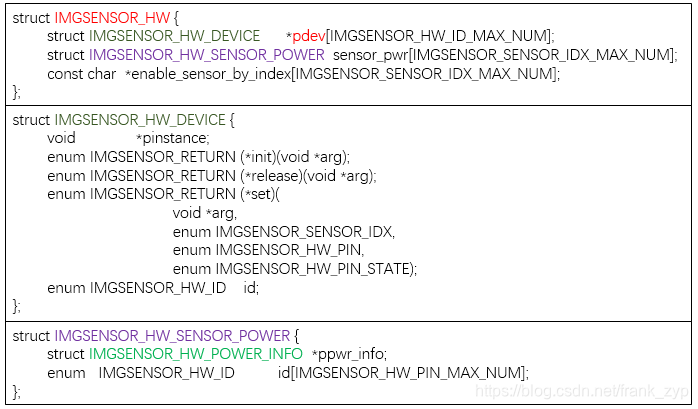
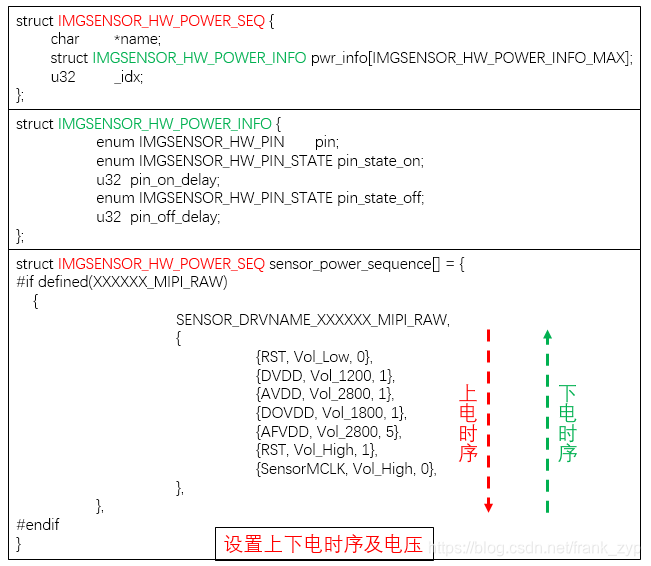
(2)上电时序控制相关:
上电方式控制:GPIO?REGULATOR?
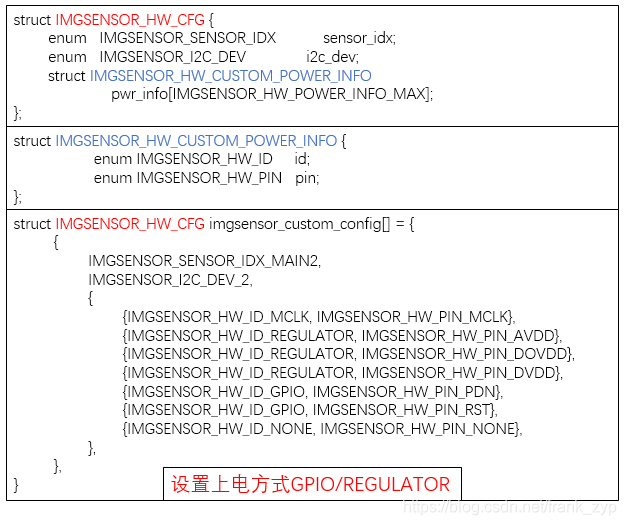
上电时序控制结构体:
三、系统初始化:
1、设备加载:
imgsensor和其他的驱动模块相同,也是通过module_init来初始化模块,在init中注册platform总线驱动,
从而需要对应的platform_driver结构体信息:
static const struct of_device_id gimgsensor_of_device_id[] = {
{ .compatible = "mediatek,camera_hw", },
{}
};
static struct platform_driver gimgsensor_platform_driver = {
.probe = imgsensor_probe,
.remove = imgsensor_remove,
.suspend = imgsensor_suspend,
.resume = imgsensor_resume,
.driver = {
.name = "image_sensor",
.owner = THIS_MODULE,
#ifdef CONFIG_OF
.of_match_table = gimgsensor_of_device_id,
#endif
}
};
当gimgsensor_of_device_id的信息在dts中match上以后回执行到对应的probe函数,probe中主要注册
了sensordrv的字符设备和初始化imgsensor的硬件信息(时钟及上电):
static int imgsensor_probe(struct platform_device *pdev)
{
/* Register char driver */
imgsensor_driver_register();
gpimgsensor_hw_platform_device = pdev;
imgsensor_clk_init(&pgimgsensor->clk);
imgsensor_hw_init(&pgimgsensor->hw);
imgsensor_i2c_create();
imgsensor_proc_init();
atomic_set(&pgimgsensor->imgsensor_open_cnt, 0);
return 0;
}
2、imgsensor_driver_register创建字符设备:
//字符设备的file_operation结构体
static const struct file_operations gimgsensor_file_operations = {
.owner = THIS_MODULE,
.open = imgsensor_open,
.release = imgsensor_release,
.unlocked_ioctl = imgsensor_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl = imgsensor_compat_ioctl
#endif
};
static inline int imgsensor_driver_register(void){
//分配一个设备号和nanme
alloc_chrdev_region(&dev_no, 0, 1, IMGSENSOR_DEV_NAME)
/* Allocate driver */
gpimgsensor_cdev = cdev_alloc();
/* Attatch file operation. */
cdev_init(gpimgsensor_cdev, &gimgsensor_file_operations);
/* Add to system */
cdev_add(gpimgsensor_cdev, dev_no, 1);
gpimgsensor_class = class_create(THIS_MODULE, "sensordrv");
device_create(gpimgsensor_class, NULL, dev_no, NULL, IMGSENSOR_DEV_NAME);
}
3、imgsensor_clk_init 时钟初始化:
enum IMGSENSOR_RETURN imgsensor_clk_init(struct IMGSENSOR_CLK *pclk)
{
int i;
struct platform_device *pplatform_dev = gpimgsensor_hw_platform_device;
/* get all possible using clocks */
for (i = 0; i < IMGSENSOR_CCF_MAX_NUM; i++)
pclk->imgsensor_ccf[i] =
devm_clk_get(&pplatform_dev->dev, gimgsensor_mclk_name[i]);
return IMGSENSOR_RETURN_SUCCESS;
}
4、imgsensor_hw_init电压初始化:
(1)依次调用GPIO/REGULATOR/MCLK的init接口;
(2)解析出imgsensor_custom_config,获取到对应sensor的对应管脚(DVDD/AVDD...)的上电方式(GPIO/REGULATOR);
enum IMGSENSOR_RETURN imgsensor_hw_init(struct IMGSENSOR_HW *phw)
{
struct IMGSENSOR_HW_SENSOR_POWER *psensor_pwr;
struct IMGSENSOR_HW_CFG *pcust_pwr_cfg;
struct IMGSENSOR_HW_CUSTOM_POWER_INFO *ppwr_info;
int i, j;
char str_prop_name[LENGTH_FOR_SNPRINTF];
struct device_node *of_node
= of_find_compatible_node(NULL, NULL, "mediatek,camera_hw");
//依次调用GPIO/REGULATOR/MCLK的init接口;
for (i = 0; i < IMGSENSOR_HW_ID_MAX_NUM; i++) {
if (hw_open[i] != NULL)
(hw_open[i])(&phw->pdev[i]);
if (phw->pdev[i]->init != NULL)
(phw->pdev[i]->init)(phw->pdev[i]->pinstance);
}
//解析出imgsensor_custom_config
for (i = 0; i < IMGSENSOR_SENSOR_IDX_MAX_NUM; i++) {
psensor_pwr = &phw->sensor_pwr[i];
pcust_pwr_cfg = imgsensor_custom_config;//上电时序
while (pcust_pwr_cfg->sensor_idx != i)
pcust_pwr_cfg++;
//退出循环
if (pcust_pwr_cfg->sensor_idx == IMGSENSOR_SENSOR_IDX_NONE)
continue;
//ppwr_info对应{IMGSENSOR_HW_ID_GPIO, IMGSENSOR_HW_PIN_AVDD}
ppwr_info = pcust_pwr_cfg->pwr_info;
while (ppwr_info->pin != IMGSENSOR_HW_PIN_NONE) {
//查询imgsensor_custom_config中ID_PIN 是否在GPIO/REGULATOR/Mclk中?
for (j = 0; j < IMGSENSOR_HW_ID_MAX_NUM; j++){
if (ppwr_info->id == phw->pdev[j]->id)
break;
}
//将对应sensor的对应PIN(DVDD/AVDD...)设置为系统的ID_PIN(GPIO/REGULATOR/MCKL)
psensor_pwr->id[ppwr_info->pin] = j;
ppwr_info++;
}
}
//判断dts中是否设定对应的index为对应的name,如:cam3_enable_sensor = "gc2375hmain3_mipi_raw";
for (i = 0; i < IMGSENSOR_SENSOR_IDX_MAX_NUM; i++) {
memset(str_prop_name, 0, sizeof(str_prop_name));
snprintf(str_prop_name,
sizeof(str_prop_name),
"cam%d_%s",
i,
"enable_sensor");
if (of_property_read_string(
of_node,
str_prop_name,
&phw->enable_sensor_by_index[i]) < 0) {
pr_info("Property cust-sensor not defined\n");
phw->enable_sensor_by_index[i] = NULL;
}
}
return IMGSENSOR_RETURN_SUCCESS;
}
5、imgsensor_i2c_create I2C设备初始化:
enum IMGSENSOR_RETURN imgsensor_i2c_create(void)
{
int i;
for (i = 0; i < IMGSENSOR_I2C_DEV_MAX_NUM; i++)
i2c_add_driver(&gi2c_driver[i]);
return IMGSENSOR_RETURN_SUCCESS;
}
6、具体类型的上电介绍(以pmic控制的regulator方式为例)
前面imgsensor_hw_init中有去调用imgsensor_hw_regulator_open和regulator_init:
(1)传入对应的设备的device结构体:
static struct IMGSENSOR_HW_DEVICE device = {
.pinstance = (void *)®_instance,
.init = regulator_init,//开机初始化时调用
.set = regulator_set,//在上电设置电压时会调用
.release = regulator_release,
.id = IMGSENSOR_HW_ID_REGULATOR
};
enum IMGSENSOR_RETURN imgsensor_hw_regulator_open(
struct IMGSENSOR_HW_DEVICE **pdevice)
{
*pdevice = &device;
return IMGSENSOR_RETURN_SUCCESS;
}
(2)调用对应的init进行初始化:
因为MTK 平台的PMIC上电是通过统一的REGULATOR进行统一管理的,每一种上电方式需要申请对应type
的regulator控制的结构体,才可以来进行设置:
enum REGULATOR_TYPE {
REGULATOR_TYPE_VCAMA,
REGULATOR_TYPE_VCAMD,
REGULATOR_TYPE_VCAMIO,
REGULATOR_TYPE_MAX_NUM
};
static enum IMGSENSOR_RETURN regulator_init(void *pinstance)
{
struct REGULATOR *preg = (struct REGULATOR *)pinstance;
struct device *pdevice;
struct device_node *pof_node;
int j, i;
char str_regulator_name[LENGTH_FOR_SNPRINTF];
pdevice = gimgsensor_device;
for (j = IMGSENSOR_SENSOR_IDX_MIN_NUM;j < IMGSENSOR_SENSOR_IDX_MAX_NUM;j++) {
for (i = 0; i < REGULATOR_TYPE_MAX_NUM; i++) {
snprintf(str_regulator_name,
sizeof(str_regulator_name),
"cam%d_%s", j,
regulator_control[i].pregulator_type);
preg->pregulator[j][i] =
regulator_get(pdevice, str_regulator_name);
if (preg->pregulator[j][i] == NULL)
pr_err("regulator[%d][%d] %s fail!\n",
j, i, str_regulator_name);
atomic_set(&preg->enable_cnt[j][i], 0);
}
}
pdevice->of_node = pof_node;
imgsensor_oc_init();
return IMGSENSOR_RETURN_SUCCESS;
}
到这里imgsensor部分的内容还有对上(hal层)承接的ioctl相关的内容没有介绍,这部分的内容会在后续的
整个系统调用流程中进行梳理。
作者:frank_zyp
您的支持是对博主最大的鼓励,感谢您的认真阅读。
本文无所谓版权,欢迎转载。
来源:CSDN
作者:frank_zyp
链接:https://blog.csdn.net/frank_zyp/article/details/104312618