解析论文:A Sampling-Based Local Trajectory Planner for Autonomous Driving
along a Reference Path
文章依然采用了sampling based method 进行规划。
主要包含四个部分:参考线优化,空间曲线规划,速度曲线规划,代价函数最优问题
结构如图: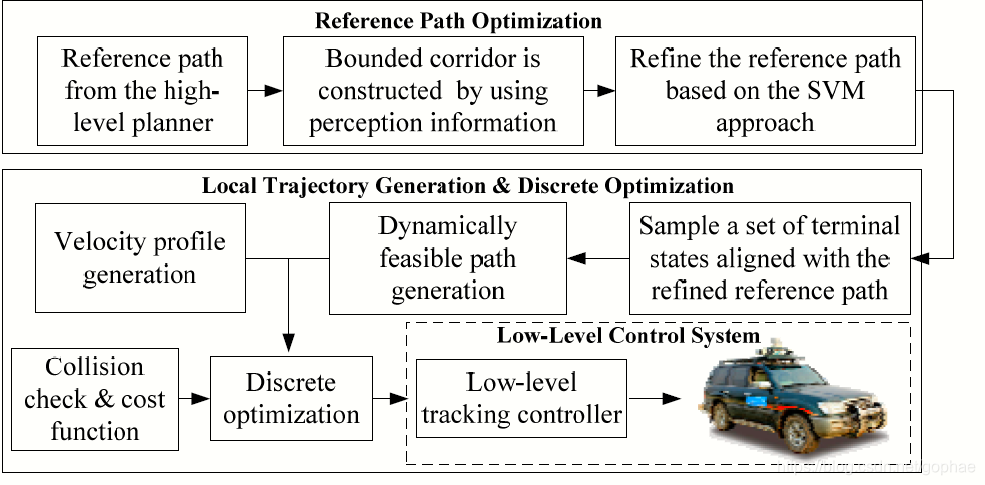
第一部分:使用SVM进行参考线优化: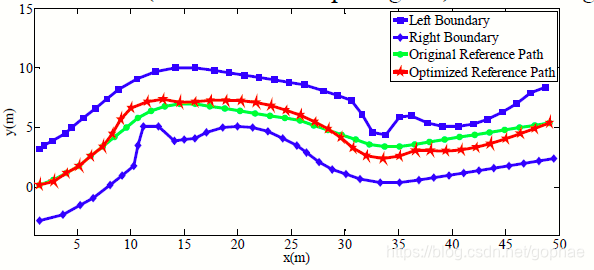
具体的方法参考svm, 主要原理就是最大化边界距离。
空间曲线规划参见另一篇文章解析自动驾驶路径规划论文解析(2)
速度曲线的规划,需要满足一下几个限制: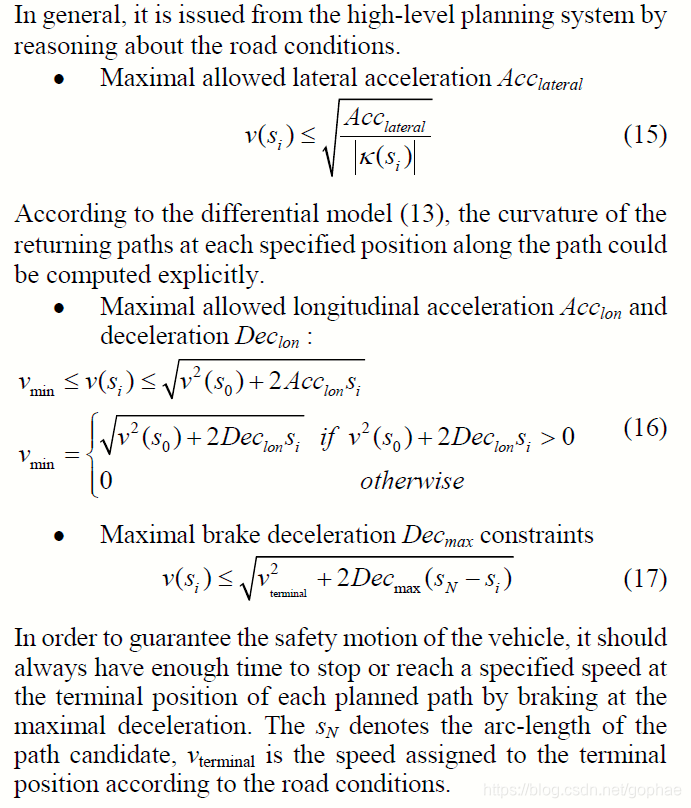
cost function 由三部分组成: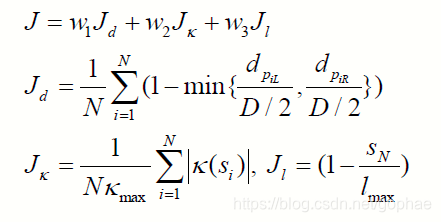
第一个,用于惩罚偏离参考线。第二个用于惩罚曲率,直线的曲率为0,我们希望尽量走直线。第三个,用于惩罚撒点长度,我们不想最优曲线过长,撒的太远效率不高。但是也有论文认为,曲线应该撒尽量长,这样可以避免曲线太短,发生频繁局部变化。
最后解最优问题: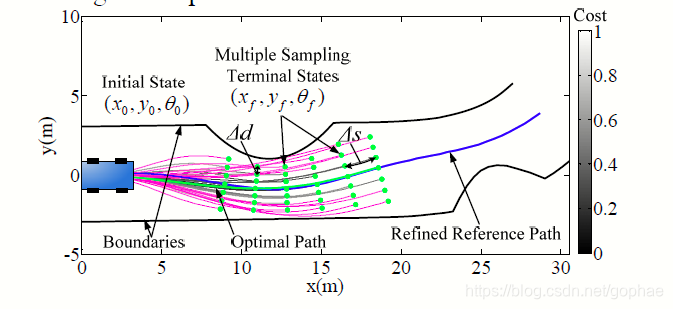
来源:CSDN
作者:gophae
链接:https://blog.csdn.net/gophae/article/details/104283034