part one:matlab 编程小结。
1.char 与string的区别,char使用的单引号 ‘’ ,string使用的是双引号“”。
2.一般标题中的输出一定要通过 num2str 处理,画图具体的图像细节参考:https://blog.csdn.net/Darlingqiang/article/details/108748638
3.查找字符A中是否包含字符串object_info,使用 obj_lookup=strfind(A,'object_info');如果 obj_lookup==1 寻找的A变量所在的数组存在object_info
4. 高斯函数仿真图片
dia = 1;%散斑直径
sigma = 1;
gausFilter = fspecial('gaussian', [dia,dia], sigma);
5.超像素处理, kernel=imresize(gausFilter,times);%%imresize 使用双三次插值。 B = imresize(A,scale) 返回图像 B,它是将 A 的长宽大小缩放 scale 倍之后的图像。
6. 图像旋转imrotate,逆时针为正,
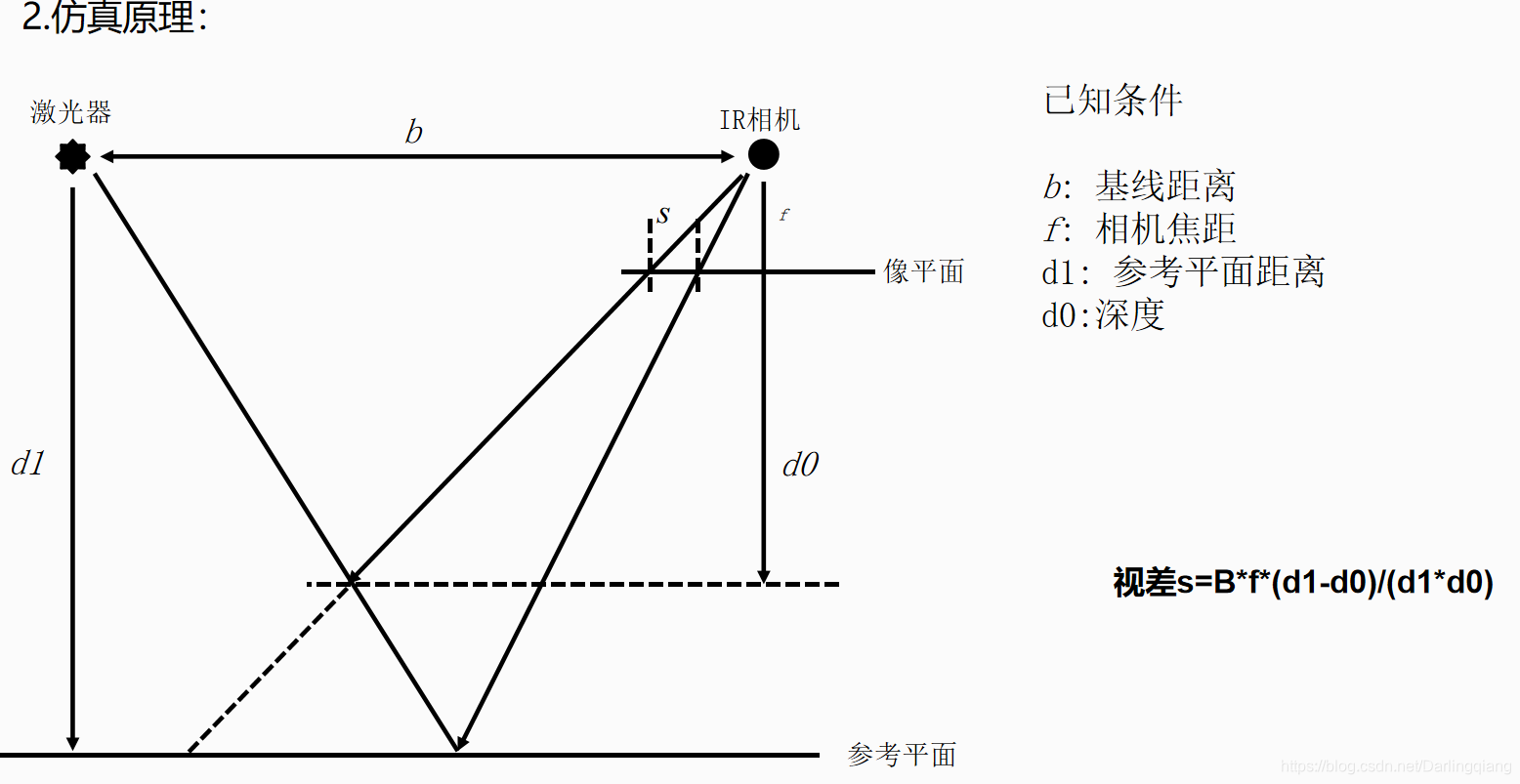
7.投影模型公式 s=B*f*(d1-d0)/(d1*d0);其中其中,B为基线长度,f为焦距,d0为标定距离,d1为当前深度,s为视差。
8.保存数组到txt文件demo.
fileID=fopen([save_path,'scene',num2str(变量),'_obj_info.txt'],'w'); %输出集合数组 fmt = '%6f %6f %6f %6f\n'; %%精确到多少位 fprintf(fileID,fmt, col2,row2, disparity_x, disparity_y);%保存数组为竖图 fclose(fileID);再一次加载:
cur_obj=load([save_path,'scene',num2str(scene_index),'_dis', num2str(distance(dis_index)),'_ref',num2str(d0),'_obj_info.txt']);
9.显示图像,不包含白色边框,保存图片不包含边框。
figure(10000), imshow(obj_image_rot, 'border', 'tight') image_name=[ 'scene',num2str(d0),'.bmp']; imwrite(obj_image,[save_path,image_name]);
10.matlab调用exe
[status,result] = system(['C:\bin\RelWithDebInfo\depth_magic_runner.exe "', [save_path,image_name],'" --config "C:\Users\Administrator\Desktop\vescl_after\getconfig"']) ;sttaus返回值为0时,说明程序运行成功,可以通过‘echo’,将输出中间结果打印到屏幕
11.文件更改名称和移动,拷贝等操作。
movefile("debug_output",string(hole_image_name),'f');%改名 pause(0.001); movefile(string(hole_image_name),targetPathOri,'f');%移动 pause(0.001);由于移动速度比较低,很多的IO读入写入操作,防止程序阻塞可以使用pause等待程序执行完之后再运行其他程序
12.文件检索遍历图片,见https://blog.csdn.net/Darlingqiang/article/details/108286336
13.直方图统计与三维直方图统计
figure(112) histogram_y = histogram(disparity_y); title(['y disparity analyze ---- ','y truth mean=',num2str(disparity_y_mean_real_value),',y truth var=',num2str(disparity_y_val_real_value)]) xlabel('the value of disparity y') ylabel('the histogram of disparity y'); led_y=legend(['y mean=',num2str(disparity_y_mean),' y var=',num2str(disparity_y_var)]); title(led_y,'speckle center extract '); saveas(figure(112), [allresult(1).folder, '\disparity_y.bmp'])% look up biger x bias distribute along x figure(105) histogram_bias_x = histogram2((disparity_diff_matching_x(1:match_num)-disparity_x_mean_real_value),x_ordinate_of_matching_point,... 'Normalization','probability','FaceColor','flat'); title('bias x after speckle center extract '); xlabel('x coordinate') ylabel('bias x'); saveas(figure(105), [allresult(1).folder, '\bias_x_after_speckle_center_extract.bmp']);
14.点云处理相关。
读取ply:
data_source=pcread('C:\Users\Administrator\Desktop\vescl\ply\adis800_pc_wave.ply');仿真生成点云参考part two函数:
function [data_target]=scene_to_ply_downsample_function(scene,height,width,distance,multiplier)点云可视化:
figure(1) point_plane = [z_plane_row,z_plane_col,depth_z_plane]; pc_plane = pointCloud(point_plane); pcshow(pc_plane);点云保存:
tic pcwrite(pc_plane,['adis',num2str(dis),'_pc_plane.ply'],'PLYFormat','ascii'); % pcwrite(pc_plane,['adis',num2str(dis),'_pc_plane.ply'],'PLYFormat','ascii'); toc
part two:函数记录
function [data_target]=scene_to_ply_downsample_function(scene,height,width,distance,multiplier)
输入:对应的场景深度scene1 ,及其对应的宽高,以及当前的仿真距离(也即深度),以及变大或者变小的倍数因子。
function [data_target]=scene_to_ply_downsample_function(scene,height,width,distance,multiplier)
% clear;
% close all;
% clc;
% dis=300;
% multip =1/2;
% height_low=400;
% width_low=640;
dis=distance;
multip =multiplier;
height_low=height;
width_low=width;
% %***************************** plane ****************************************************
tx_plane=-height_low:1:height_low-1;
ty_plane=-width_low:1:width_low-1;
[x_plane,y_plane]=meshgrid(tx_plane,ty_plane);%形成格点矩阵
z_plane=0*(10*sin(pi*x_plane/(20))+10*cos(pi*y_plane/(20)));
z_plane=imresize(z_plane,multip);
[z_plane_row,z_plane_col] = find(z_plane>=-20);
len_z_plane =length(z_plane_row);
depth_z_plane = zeros(len_z_plane,1);
for index_plane = 1:len_z_plane
z_plane_x =z_plane_row(index_plane,:);
z_plane_y =z_plane_col(index_plane,:);
depth_z_plane(index_plane) = z_plane(z_plane_x,z_plane_y)+dis;
end
% figure(11)
point_plane = [z_plane_row,z_plane_col,depth_z_plane];
pc_plane = pointCloud(point_plane);
% pcshow(pc_plane);
% tic
% pcwrite(pc_plane,['adis',num2str(dis),'_pc_plane.ply'],'PLYFormat','ascii');
% % pcwrite(pc_plane,['adis',num2str(dis),'_pc_plane.ply'],'PLYFormat','ascii');
% toc
% %***************************** step ****************************************************
% clc;
% close all;
% clear ;
% dis=300;
% multip =1/2;
% height_low=400;
% width_low=640;
z_step(2*height_low,2*width_low) = 0;
for x_step=0:(2*width_low)
for y_step=0:(2*height_low)
if ((y_step>190)&&(y_step<400)&&(x_step>150)&&(x_step<395))
z_step(y_step,x_step) = 4;
elseif ((y_step>400)&&(y_step<610)&&(x_step>150)&&(x_step<395))
z_step(y_step,x_step) = 1;
elseif ((y_step>190)&&(y_step<400)&&(x_step>395)&&(x_step<640))
z_step(y_step,x_step) = 3;
elseif ((y_step>400)&&(y_step<610)&&(x_step>395)&&(x_step<640))
z_step(y_step,x_step) = 2;
elseif ((y_step>190)&&(y_step<400)&&(x_step>640)&&(x_step<885))
z_step(y_step,x_step) = 2;
elseif ((y_step>400)&&(y_step<610)&&(x_step>640)&&(x_step<885))
z_step(y_step,x_step) = 3;
elseif ((y_step>190)&&(y_step<400)&&(x_step>885)&&(x_step<1130))
z_step(y_step,x_step) = 1;
elseif ((y_step>400)&&(y_step<610)&&(x_step>885)&&(x_step<1130))
z_step(y_step,x_step) = 4;
elseif ((y_step<190)&&(y_step>610)&&(x_step<150)&&(x_step>1130))
z_step(y_step,x_step) = 1;
end
end
end
z_step=imresize(z_step,multip);
% [rows_step,cols_step]=size(z_step);
[z_step_row,z_step_col] = find(z_step>=-20);
len_z_step =length(z_step_row);
depth_z_step = zeros(len_z_step,1);
for index_step = 1:len_z_step
z_step_x =z_step_row(index_step,:);
z_step_y =z_step_col(index_step,:);
depth_z_step(index_step) = z_step(z_step_x,z_step_y)+dis;
end
% figure(22)
point_step = [z_step_row,z_step_col,depth_z_step];
pc_step = pointCloud(point_step);
% pcshow(pc_step);
% pcwrite(pc_step,'scene.ply','PLYFormat','ascii')
% tic
% pcwrite(pc_step,['adis',num2str(dis),'_pc_step.ply'],'PLYFormat','ascii');
% toc
% %***************************** wave *********************************************
ty_single=-height_low:1:height_low-1;
tx_single=-width_low:1:width_low-1;
[x_single,~]=meshgrid(tx_single,ty_single);%形成格点矩阵
z_single=10*sin(pi*x_single/(20));%+10*cos(pi*y_wave/(20));
z_single=z_single';
z_single=imresize(z_single,multip);
[z_single_row,z_single_col] = find(z_single>=-20);
len_z_single =length(z_single_row);
depth_z_single = zeros(len_z_single,1);
for index_single = 1:len_z_single
z_single_x =z_single_row(index_single,:);
z_single_y =z_single_col(index_single,:);
depth_z_single(index_single) = z_single(z_single_x,z_single_y)+ dis;
end
% figure(33)
point_wave = [z_single_row,z_single_col,depth_z_single];
pc_wave = pointCloud(point_wave);
% pcshow(pc_wave);
% tic
% pcwrite(pc_wave,['adis',num2str(dis),'_pc_wave.ply'],'PLYFormat','ascii');
% toc
% %***************************** egg *********************************************
tx_wave=-height_low:1:height_low-1;
ty_wave=-width_low:1:width_low-1;
[x_wave,y_wave]=meshgrid(tx_wave,ty_wave);%形成格点矩阵
z_egg=5*sin(pi*x_wave/(20))+5*cos(pi*y_wave/(20));
z_egg=imresize(z_egg,multip);
[z_wave_row,z_wave_col] = find(z_egg>=-20);
len_z_wave =length(z_wave_row);
depth_z_wave = zeros(len_z_wave,1);
for index_wave = 1:len_z_wave
z_wave_x =z_wave_row(index_wave,:);
z_wave_y =z_wave_col(index_wave,:);
depth_z_wave(index_wave) = z_egg(z_wave_x,z_wave_y)+dis;
end
% figure(44)
point_plate =[z_wave_row,z_wave_col,depth_z_wave];
pc_egg = pointCloud(point_plate);
% pcshow(pc_egg);
if(strcmp(scene,'scene1'))
data_target=pc_plane;
elseif(strcmp(scene,'scene2'))
data_target=pc_step;
elseif(strcmp(scene,'scene3'))
data_target=pc_wave;
elseif(strcmp(scene,'scene4'))
data_target=pc_egg;
end
% tic
% pcwrite(pc_egg,['adis',num2str(dis),'_pc_egg.ply'],'PLYFormat','ascii');
% toc
% %***************************** triangular profiler ****************************************************
end
scene_ref_creat_function仿真生成原始散斑
输入设计的vescl pattern输出模拟散斑参考图
function [ref_speckle]=scene_ref_creat_function(center_coordinate)
max_value=800;
M=1280;
N=800;
MAX=1023;
% 生成一个高斯函数,函数与散斑点的灰度分布具有有较高的一致性,即可以很好的仿真当前的
dia = 1;%散斑直径
sigma = 1;
gausFilter = fspecial('gaussian', [dia,dia], sigma);
times=1;%奇数
kernel=imresize(gausFilter,times);%%imresize 使用双三次插值。 B = imresize(A,scale) 返回图像 B,它是将 A 的长宽大小缩放 scale 倍之后的图像。
cx=round(dia*times/2);
cy=round(dia*times/2);
R=floor(dia*times/2);
kernel_mask=ones(size(kernel));
for m=1:times*dia
for n=1:times*dia
if (cx-n)^2+(cy-m)^2>=(R+1)*R
kernel_mask(m,n)=0;
end
end
end
max_kernel = max(max(kernel));
kernel = kernel.*kernel_mask*(max_value/max_kernel)*0.3;
%
IR_speckle=zeros(M*times,N*times);
L=length(center_coordinate);
for i=1:L
center_x=round(center_coordinate(i,1)*times);
center_y=round(center_coordinate(i,2)*times);
if(((center_y-R)>0) && ((center_y+R) < M*times) && ((center_x-R)>0) && ((center_x+R) < N*times) )
IR_speckle(center_y-R:center_y+R,center_x-R:center_x+R)=IR_speckle(center_y-R:center_y+R,center_x-R:center_x+R)+ 255;
end
end
ref_speckle=(imresize(IR_speckle,1/times));
ref_speckle(ref_speckle>MAX)=MAX;
enddisparity_analyze函数,输入obj_match匹配数组,或者object_info.txt信息,输出匹配点对以及对应的视差
%% 统计六近邻中目标点的视差分布
function [disparity_diff_matching_x,disparity_diff_matching_y,x_ordinate_of_matching_point,y_ordinate_of_matching_point]=disparity_analyze(obj_match)
% obj_info_name = '';
% obj_info_name = dir(fullfile('C:\Users\Administrator\Desktop\vescl_after\result\scene1_dis500_ref400\',obj_info_name,'*object_info*.txt'));
% if exist(['C:\Users\Administrator\Desktop\vescl_after\result\scene1_dis500_ref400\' obj_info_name(1).name])
% obj_match = importdata(['C:\Users\Administrator\Desktop\vescl_after\result\scene1_dis500_ref400\' obj_info_name(1).name]);
x_thresholod=0.1;
y_thresholod=1;
match_list = find(obj_match(:,end)>0);
match_num = size(find(obj_match(:,end)>0),1);
disparity_diff_x_each_other=zeros(match_num,6);
disparity_diff_y_each_other=zeros(match_num,6);
disparity_diff_x = zeros(match_num*6,1);
% show matching status
disparity_diff_matching_x=obj_match(match_list(:),end-2);
disparity_diff_matching_y=obj_match(match_list(:),end-1);
disparity_diff_matching_y_size = size(disparity_diff_matching_y);
for i = 1:disparity_diff_matching_y_size
if(disparity_diff_matching_y(i)>5)
disparity_diff_matching_y(i)=0;
end
end
x_ordinate_of_matching_point = obj_match(match_list(:),1);
y_ordinate_of_matching_point = obj_match(match_list(:),2);
%%
disparity_diff_y = zeros(match_num*6,1);
disparity_diff_num = 0;
for i = 1:match_num
obj_num = match_list(i);
disp_x = obj_match(obj_num,end-2);
disp_y = obj_match(obj_num,end-1);
descriptor = obj_match(obj_num,end-8:end-3);
desp_list = descriptor(descriptor>0);
desp_list = desp_list + ones(size(desp_list));% from one start
for j = 1:size(desp_list,2)
if obj_match(desp_list(j),end)>0
disparity_diff_num = disparity_diff_num + 1;
disparity_diff_x(disparity_diff_num) = disp_x - obj_match(desp_list(j),end - 2);
if abs(disp_x - obj_match(desp_list(j),end - 2))-x_thresholod >=0
disparity_diff_x_each_other(i,j)=abs(disp_x - obj_match(desp_list(j),end - 2));
end
if abs(disp_y - obj_match(desp_list(j),end - 1))-y_thresholod >=0
disparity_diff_y_each_other(i,j)=abs(disp_y - obj_match(desp_list(j),end - 1));
end
% 邻域视差分布问题
disparity_diff_y(disparity_diff_num) = disp_y - obj_match(desp_list(j),end - 1);
end
end
end
%% 统计非零个数
cnt_x = zeros(match_num,1);
for i=1:match_num
cnt_x(i)= nnz(disparity_diff_x_each_other(i,:)>0);
end
x_index=find(cnt_x(:));
x_size=size(x_index,1);
% figure
% plot(1:x_size, cnt_x(x_index(:)),'r.')
% title('x disparity diff threshold great 3 distribution ');
% grid on
cnt_y = zeros(match_num,1);
for i=1:match_num
cnt_y(i)= nnz(disparity_diff_y_each_other(i,:)>0);
end
y_index=find(cnt_y(:));
y_size=size(y_index,1);
%% y 视差 纵坐标 x轴为横坐标
% figure(100)
% plot(1:match_num,disparity_diff_matching_y(1:match_num),'b.')
% title(' y disparity matching result according point num')
% grid on
%
% figure(101)
% plot(y_ordinate_of_matching_point(1:match_num),disparity_diff_matching_y(1:match_num),'b.')
% title(' y disparity matching result along y disparity')
% grid on
% figure
% plot(1:disparity_diff_num,disparity_diff_x(1:disparity_diff_num),'r.')
% title('all matching points decriptors x disparity diff ')
% grid on
%
% figure
% plot(1:disparity_diff_num,disparity_diff_y(1:disparity_diff_num),'r.')
% title('all matching points decriptors y disparity diff ')
% grid on
% figure
% histogram(disparity_diff_x(1:disparity_diff_num),'DisplayStyle','bar')
% title('histogram disparity diff x')
% saveas(gcf,strcat(root_dir, 'histogram_disparity_diff_x.bmp'));
% figure
% histogram(disparity_diff_y(1:disparity_diff_num),'DisplayStyle','bar')
% title('histogram disparity diff y')
% else
% disp(['不存在*object_info*.txt'])
% end
end
compute_IoU:求取IOU交并比,可以用于评估重建效果
function [IoU, area] = compute_IoU(region_a, region_b)
%COMPUTE_IOU Is compute the two region overlap area.
%
% ************************
% * *
% * (x_a,y_a)******************
% * * * *
% * * * *
% * * * *
% *******************(x_b,y_b) *
% * *
% * *
% ***********************
x_a = max(region_a(1), region_b(1));
y_a = max(region_a(2), region_b(2));
x_b = min(region_a(3), region_b(3));
y_b = min(region_a(4), region_b(4));
area_a = (region_a(3) - region_a(1) + 1) * (region_a(4) - region_a(2) + 1);
area_b = (region_b(3) - region_b(1) + 1) * (region_b(4) - region_b(2) + 1);
area = max(0, x_b - x_a + 1) * max(0, y_b - y_a + 1);
IoU = area / (area_a + area_b - area);
end
scene_creat_function.m 输入宽高,输出场景平面深度图
function [scene1,scene2,scene3,scene4]=scene_creat_function(height,width)
tx_plane=-height/2:1:height/2-1;
ty_plane=-width/2:1:width/2-1;
[x_plane,y_plane]=meshgrid(tx_plane,ty_plane);%形成格点矩阵
z_plane=0*(x_plane+y_plane);
scene1=z_plane;
% %***************************** SENCE 2 step ****************************************************
z_step(height,width) = 0;
for x_step=0:width
for y_step=0:height
if ((y_step>190)&&(y_step<400)&&(x_step>150)&&(x_step<395))
z_step(y_step,x_step) = 5;
elseif ((y_step>400)&&(y_step<610)&&(x_step>150)&&(x_step<395))
z_step(y_step,x_step) = 2;
elseif ((y_step>190)&&(y_step<400)&&(x_step>395)&&(x_step<640))
z_step(y_step,x_step) = 4;
elseif ((y_step>400)&&(y_step<610)&&(x_step>395)&&(x_step<640))
z_step(y_step,x_step) = 3;
elseif ((y_step>190)&&(y_step<400)&&(x_step>640)&&(x_step<885))
z_step(y_step,x_step) = 3;
elseif ((y_step>400)&&(y_step<610)&&(x_step>640)&&(x_step<885))
z_step(y_step,x_step) = 4;
elseif ((y_step>190)&&(y_step<400)&&(x_step>885)&&(x_step<1130))
z_step(y_step,x_step) = 2;
elseif ((y_step>400)&&(y_step<610)&&(x_step>885)&&(x_step<1130))
z_step(y_step,x_step) = 5;
elseif ((y_step<190)&&(y_step>610)&&(x_step<150)&&(x_step>1130))
z_step(y_step,x_step) = 0;
end
end
end
scene2=z_step';
% %***************************** SENCE 3 wave *********************************************
ty_single=-height/2:1:height/2-1;
tx_single=-width/2:1:width/2-1;
[x_single,~]=meshgrid(tx_single,ty_single);%形成格点矩阵
z_wave=10*sin(pi*x_single/(20));%+10*cos(pi*y_wave/(20));
scene3=z_wave';
% %***************************** SENCE 4 egg *********************************************
tx_wave=-height/2:1:height/2-1;
ty_wave=-width/2:1:width/2-1;
[x_wave,y_wave]=meshgrid(tx_wave,ty_wave);%形成格点矩阵
z_egg=5*sin(pi*x_wave/(20))+5*cos(pi*y_wave/(20));
scene4=z_egg;
end
来源:oschina
链接:https://my.oschina.net/u/4347613/blog/4641226