转矩工具以太网驱动程序(中文版)
Kepware - Torque Tool Ethernet Driver
编制:雲飛兄
Kepware QQ群:905485143
2020-08-13
目录
| 目录 |
2 |
| 转矩工具以太网驱动程序 |
4 |
| 概述 |
4 |
| 设备设置-Device Setup |
5 |
| 通信参数-Communications Parameters |
5 |
| 设置-Settings |
6 |
| 优化通信-Optimizing Communications |
7 |
| 数据类型说明-Data Types Description |
9 |
| 地址说明-Address Descriptions |
10 |
| 消息ID-Message IDs |
10 |
| 命令集:报警- Alarm |
12 |
| 命令集:自动禁用设置- Auto-Disable Settings |
12 |
| 命令集:Flash |
12 |
| 命令集:标识符- Identifiers |
12 |
| 命令集:作业信息- Job Info |
13 |
| 命令集:作业编号数据- Job Number Data |
14 |
| 命令集:上次拧紧结果- Last Tightening Results |
14 |
| 命令集:多轴结果- Multi Spindle Results |
17 |
| 命令集:旧的拧紧结果- Old Tightening Results |
18 |
| 命令集:参数集数据- Parameter Set Data |
21 |
| 命令集:参数集编号- Parameter Set Numbers |
21 |
| 命令集:选定的参数集- Parameter Set Selected |
22 |
| 命令集:时间- Time |
22 |
| 命令集:刀具数据- Tool Data |
22 |
| 命令集:VIN |
23 |
目录
概述 Overview
什么是转矩工具以太网驱动程序?
设备设置 Device Setup
如何配置与此驱动程序一起使用的设备?
优化扭矩工具以太网通信 Optimizing Your Torque Tool Ethernet Communications
如何从驱动程序获得最佳性能?
数据类型说明 Data Types Description
转矩工具以太网驱动程序支持哪些数据类型?
地址说明 Address Descriptions
如何引用转矩工具以太网设备中的数据位置?
错误描述 Error Descriptions
转矩工具以太网驱动程序产生什么错误消息?
概述
转矩工具以太网驱动程序提供了一种将转矩工具以太网设备连接到OPC客户端应用程序(包括HMI、SCADA、Historian、MES、ERP和无数自定义应用程序)的可靠方法。它旨在与所有支持转矩工具开放协议的设备一起工作。
设备设置 Device Setup
支持的设备 Supported Devices
Torque Tool以太网驱动程序设计用于支持Torque Tool开放协议的任何设备。该驱动程序已经测试了斯坦利QAα控制器和Atlas Copco功率聚焦。
通道和设备的最大数量 Maximum Number of Channels and Devices
驱动程序最多支持100个通道和1024个设备。
通信参数 Communications Parameters

参数说明如下:
- 端口号- Port Number::此参数指定驱动程序连接到 设备时将使用的端口号。有效范围是0到65535。默认设置是4545。对于开放协议,默认设置是4545。对于FEP,默认设置是9001。
- 设置所有DNR的错误状态- Set Error State for All DNRs:选中时,如果设备未设置,驱动程序将设置错误状态 响应(DNR)写入或订阅请求。如果设备不响应读取,则驱动程序将始终设置错误状态。默认设置为未选中。
- 轮询时间- Poll Time:此参数指定驱动程序向设备发送“保持活动”消息之前的不活动时间。有效范围是1到15秒。默认设置为10秒。
注意Caution:如果“保持活动”间隔设置为大于10秒的值,则驱动程序可能会在事件日志中发布“设备 无响应”消息。这是因为设备关闭了连接。
- 回复超时Reply Timeout:此参数指定驱动程序等待来自 保持活动消息的响应的时间。有效范围是100到30000毫秒。默认设置为1000毫秒(1秒)。
- 在以下时间后失败 Fail After:此参数指定驱动程序在考虑其失败之前尝试发送“保持活动”消息的次数。有效范围是1到10。默认设置是3。
------------------------------------------
设置 Settings
设置参数用于从设备请求不同版本的消息。要请求特定的消息修订,请输入该消息的消息修订号。如果设备不支持修订,请输入0。
注意:FEP模型不支持消息修订,并且将禁用这些选项。

参数说明如下:
- VIN:此参数指定“车辆识别号”消息的修订号。此时 支持1、2。默认设置为0。
- 近收紧扭矩 Last Tightening:此参数指定“最新收紧结果”消息的修订版号。目前,支持1..5和999(用于低带宽版本)。默认设置为0。
- 旧收紧 Old Tightening:此参数指定旧收紧结果消息的修订号。 目前支持1..4。默认设置为0。
- 在LTR上禁用工具 Disable Tool On LTR:选中后,只要收到最后的拧紧结果 (LTR)消息,驱动程序就会禁用该工具。这样可以确保在系统有时间处理之前,不会覆盖任何LTR数据。默认设置为未选中。
------------------------------------------
Torque Tool以太网驱动程序旨在提供最佳性能,同时对系统整体性能的影响最小。虽然Torque工具以太网驱动程序速度很快,但有一些准则可以用来控制和优化应用程序并获得最大性能。
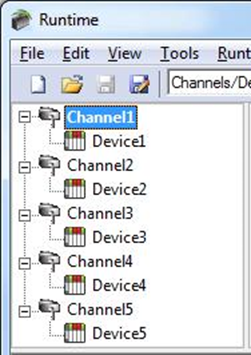
该服务器将Torque工具以太网等通信协议作为通道。应用程序中定义的每个通道都表示服务器中一个单独的执行路径。一旦定义了一个通道,就必须在该通道下定义一系列设备。这些装置中的每一个都代表一个扭矩工具控制器,从中收集数据。虽然这种定义应用程序的方法将提供高水平的性能,但它不能充分利用Torque工具以太网驱动程序或网络。使用单通道配置时应用程序的显示示例如下所示。

每个设备出现在一个扭矩工具以太网通道下。在这种配置中,驱动程序必须尽快从一个设备移动到另一个设备,以有效速率收集信息。随着添加更多设备或从单个设备请求更多信息,总体更新率开始下降。
如果Torque Tool以太网驱动程序只能定义一个通道,那么上面显示的示例将是唯一可用的选项。但是,扭矩工具以太网驱动程序最多可以定义100个通道。使用多个通道可通过同时向网络发出多个请求来分配数据收集工作量。下面显示了使用多个通道配置以提高性能时如何显示同一应用程序的示例。
现在每个设备都在自己的通道下定义。在这种新的配置中,一条执行路径专用于从每个设备收集数据的任务。如果应用程序有100台或更少的设备,可以对其在此处的显示方式进行优化。
即使应用程序有100多个设备,性能也会提高。虽然100个或更少的设备可能是理想的,但应用程序仍将受益于额外的信道。虽然通过将设备负载分散到所有通道将导致服务器再次从一个设备移动到另一个设备,但它现在可以在一个通道上处理的设备更少。
注意:某些设备仅支持一个以太网连接。对于这些设备,仅应配置一个通道和一个设备。
------------------------------------------
数据类型说明 Data Types Description
转矩工具以太网驱动程序支持以下数据类型。
| 数据类型 |
说明 |
| 布尔型 Boolean |
单钻头 Single bit |
| 字 Word |
无符号16位整数 |
| 短* Short |
有符号16位整数 |
| 双字 DWord |
无符号32位整数 |
| 长* Long* |
有符号32位整数 |
| 字符串 String |
ASCII文本字符串 |
| 浮点 Float |
32位浮点值 |
| 双浮点* Double |
64位浮点值 |
*这些类型不是本机使用的,而是通过转换支持的。
注意:驱动程序中使用的每个标签都有固定的数据类型。因此,建议用户允许驱动程序 使用该点的默认数据类型。
------------------------------------------
扭矩工具以太网驱动程序通过将要寻址的项目名称指定地址。可以选择在其后跟一个位或索引号。
语法为ITEMNAME <.BIT / INDEX>,其中:
- ITEMNAME:要处理的项目的名称。
- BIT / INDEX:使用位字段的项的位数,或排列项的索引。位/索引仅 用于某些地址项。
重要 Important:位是从0开始的,0是LSB。数组索引从1开始,第一个为1。
------------------------------------------
某些命令集是设备主动发送的。在设备将数据发送到驱动程序之前,这些命令集将没有可用的数据。所有未经请求的命令集都有一个NEWDATA项,当新数据到达时,它将设置为1。然后,用户可以通过向其写入任何值来将其清除为0。
消息修订 Message Revisions
有些命令具有硬件可能支持的多个消息修订。某些项目仅适用于某些邮件修订版。这些项目已标记为在某个邮件修订版中可用。例如,标记为(版本2)的项仅在消息修订版2或更高版本中可用。有些邮件还提供低带宽版本,并将进行适当标记。
协议 Protocols
扭矩工具以太网驱动程序支持开放协议模型和福特以太网协议(FEP)模型。每个协议都支持一组命令,这些命令具有一个或多个可用于寻址的项。并非每种型号都支持所有命令集。有关更多信息,请从下面的列表中选择一个链接。
报警 Alarm
自动禁用设置 Auto-Disable Settings
闪 Flash
标识符 Identifiers
工作信息 Job Info
作业编号数据 Job Number Data
上次拧紧结果 Last Tightening Results
多轴结果 Multi Spindle Results
旧的拧紧结果 Old Tightening Results
参数集数据 Parameter Set Data
参数集编号 Parameter Set Numbers
已选择参数集 Parameter Set Selected
时间 Time
刀具数据 Tool Data
VIN
------------------------------------------
有每种设备型号支持的消息ID(MID)的更多信息,请参阅下表。
| 消息ID |
说明 |
支持的模型 |
| 0001 |
开始沟通。 |
Open,FEP |
| 0002 |
启动通信确认。 |
Open,FEP |
| 0003 |
停止通讯。 |
Open,FEP |
| 0004 |
命令错误。 |
Open,FEP |
| 0005 |
命令已接受。 |
Open,FEP |
| 0010 |
Pset号码上传请求。 |
Open,FEP |
| 0011 |
Pset号码上传回复。 |
Open,FEP |
| 0012 |
Pset数据上传请求。 |
Open,FEP |
| 0013 |
Pset数据上传回复。 |
Open,FEP |
| 0014 |
Pset已选择订阅。 |
Open,FEP |
| 0015 |
Pset选择电报。 |
Open,FEP |
| 0016 |
Pset选择电报确认。 |
Open,FEP |
| 0017 |
Pset已选择取消订阅。 |
Open,FEP |
| 消息ID |
说明 |
支持的型号 |
| 0018 |
选定的Pset。 |
Open,FEP |
| 0019 |
设置Pset批量大小。 |
Open,FEP |
| 0020 |
重置Pset批量大小。 |
Open,FEP |
| 0030 |
作业编号上传请求。 |
Open,FEP |
| 0031 |
作业编号上传回复。 |
Open,FEP |
| 0034 |
所选作业/信息订阅。 |
Open,FEP |
| 0035 |
所选作业/信息 |
Open,FEP |
| 0036 |
所选作业/信息确认。 |
Open,FEP |
| 0037 |
已选择作业/信息取消订阅。 |
Open,FEP |
| 0038 |
在PF3000中选择的作业。 |
Open,FEP |
| 0039 |
作业重新启动。 |
Open,FEP |
| 0040 |
刀具数据上传请求。 |
Open,FEP |
| 0041 |
工具数据上传回复。 |
Open,FEP |
| 0042 |
禁用工具。 |
Open,FEP |
| 0043 |
启用工具。 |
Open,FEP |
| 0050 |
请求下载VIN。 |
Open,FEP |
| 0051 |
VIN上传订阅。 |
Open,FEP |
| 0052 |
VIN编号上传。 |
Open,FEP |
| 0053 |
VIN上传确认。 |
Open,FEP |
| 0054 |
VIN上传订阅。 |
Open,FEP |
| 0060 |
最后拧紧结果(LTR)订阅。 |
Open,FEP |
| 0061 |
LTR上传。 |
Open,FEP |
| 0062 |
LTR上传确认。 |
Open,FEP |
| 0063 |
LTR取消订阅。 |
Open,FEP |
| 0064 |
旧拧紧结果(OTR)上载请求。 |
Open,FEP |
| 0065 |
OTR上传回复。 |
Open,FEP |
| 0070 |
报警订阅。 |
Open,FEP |
| 0071 |
报警上传回复。 |
Open,FEP |
| 0072 |
报警上传确认。 |
Open,FEP |
| 0073 |
警报取消订阅。 |
Open,FEP |
| 0074 |
扭矩控制器上的警报确认。 |
Open,FEP |
| 0075 |
转矩控制器上的警报确认。 |
Open,FEP |
| 0076 |
报警状态。 |
Open,FEP |
| 0077 |
报警状态确认。 |
Open,FEP |
| 0080 |
时间上传请求。 |
Open,FEP |
| 0081 |
时间上传。 |
Open,FEP |
| 0082 |
在转矩控制器中设置时间。 |
Open,FEP |
| 0100 |
多轴结果订阅。 |
FEP ** |
| 0101 |
多轴结果上传。 |
FEP ** |
| 0102 |
多轴结果上传确认。 |
FEP ** |
| 0103 |
多轴结果取消订阅。 |
FEP ** |
| 0113 |
闪光绿灯工具。 |
Open,FEP |
| 0127 |
作业中止。 |
Open,FEP |
| 0400 |
自动/手动模式订阅。 |
FEP |
| 0401 |
自动/手动模式上传。 |
FEP |
| 0402 |
自动/人工模式确认。 |
FEP |
| 0403 |
自动/手动模式退订。 |
FEP |
| 0410 |
自动禁用设置请求。 |
FEP |
| 0411 |
自动禁用设置回复。 |
FEP |
| 0999 |
活下去 Keep alive |
Open,FEP |
*仅支持FEP规范第4.62版所示的中间版本1。
**此项仅受FEP设备型号支持。
------------------------------------------
命令集:报警 Alarm
报警命令集用于接收报警数据。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
|
|
范围 |
|
|
Boolean |
Read Only |
0如果没有激活的警报,1如果有警报 |
0-1 |
|
| ALARM_STATUS |
|
|
当前处于活动状态* 报警器状态 |
|
|
|
|
String |
Read Only |
错误代码。 |
4 |
|
| ALARM_ERROR |
|
|
|
|
characters |
|
|
Boolean |
Read Only |
控制器就绪状态。 |
0-1 |
|
| ALARM_C_READY |
|
|
1 |
=好的 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
Boolean |
Read Only |
刀具准备状态。 |
0-1 |
|
| ALARM_T_READY |
|
|
1 |
=好的 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
String |
Read Only |
报警时间 时间戳 |
19 |
|
| ALARM_TIME |
|
|
|
|
characters |
|
|
Boolean |
Read/Write |
报警新数据 新数据标志。新数据时设置为1 |
0-1 |
|
| ALARM_NEWDATA |
|
|
到达。将0写入此标志以清除它。 |
|
*根据接收到的报警信息类型,报警状态标志可能不可用。
------------------------------------------
命令集:自动禁用设置 Auto-Disable Settings
自动禁用设置命令集仅受FEP模型支持。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
|
|
范围 |
| AD_SETTING |
Word, Short |
Read Only |
自动禁用设置。 |
0-99 |
|
| AD_BATCH |
Word, Short |
Read Only |
当前批次。 |
0-99 |
|
| AM_MODE |
Boolean |
Read Only |
自动/手动模式。 |
2-10 |
|
|
|
|
|
0 |
= Automatic Mode |
|
|
|
|
|
1 |
= Manual Mode |
|
| AM_NEWDATA |
Boolean |
Read/Write |
新数据标志。新数据时设置为1 |
0-1 |
|
|
|
|
|
到达。将0写入此标志以清除它。 |
|
------------------------------------------
命令集:Flash
闪光命令集用于使工具的绿灯闪烁。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
范围 |
| FLASH |
Boolean |
Write Only |
将任何值写入此项以导致 |
N/A |
|
|
|
|
工具上的绿灯闪烁直到 |
|
|
|
|
|
操作员按下刀具触发器。 |
|
------------------------------------------
命令集:标识符 Identifiers
标识符命令集用于管理控制器中的多个标识符。仅开放协议模型支持它。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
|
范围 |
|
| ID_DOWNLOAD |
String |
Write Only |
将标识符写入此项以发送 |
100 |
|
|
|
|
|
控制器的标识符。 |
characters |
|
| ID_BYPASS |
Boolean |
Write Only |
将任何值写入此项以绕过 |
N/A |
|
|
|
|
|
工单中需要下一个标识符。 |
|
|
| ID_RESET
|
Boolean
|
Write Only
|
将任何值写入此项以重置 最新标识符或绕过的标识符 工单。 |
N/A |
|
| ID_RESETALL |
Boolean |
Write Only |
将任何值写入此项以重置全部 |
N/A |
|
|
|
|
|
工单中的标识符。 |
|
|
| MID_TYPE |
Word, Short |
Read Only |
标识符类型号* |
1-4 |
|
| MID_IN_ORDER |
Boolean |
Read Only |
包含在工单中* |
0-1 |
|
|
|
|
|
0=否 |
|
|
|
|
|
|
1=是 |
|
|
| MID_STATUS |
Word, Short |
Read Only |
工单状态* |
0-3 |
|
|
|
|
|
0 |
= Not accepted. |
|
|
|
|
|
1 |
= Accepted. |
|
|
|
|
|
2 |
= Bypassed. |
|
|
|
|
|
3 |
= Reset. |
|
| MID_ID |
String |
Read Only |
标识符* |
25 |
|
|
|
|
|
|
|
characters |
| MID_NEWDATA |
Boolean |
Read/Write |
新数据标志。新数据时设置为1 |
N/A |
|
|
|
|
|
到达。将0写入此标志以清除它。 |
|
*这些项需要数组索引(1..4)。
------------------------------------------
命令集:作业信息 Job Info
作业信息命令集用于接收有关所选作业的数据,允许用户选择其他作业并控制作业执行。
注意:某些命令集项也具有别名。在下表中,别名将在下面列出 适用的项目。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
范围 |
| JOB_JOBNUM |
Word, Short |
Read/Write |
所选作业编号。选择 |
0-99 |
| LINK_LINKNUM |
|
|
不同的工作,写一个工作号到这个 |
|
|
|
|
|
项目。 |
|
| JOB_STATUS* |
Word, Short |
Read Only |
作业批次状态。 |
0-2 |
| LINK_STATUS* |
|
|
0=作业批处理未完成。 |
|
|
|
|
|
|
|
|
|
|
|
1=作业批次正常。 |
|
|
|
|
|
2=作业批次不合格。 |
|
| JOB_BMODE* |
Word, Short |
Read Only |
作业批处理模式。 |
0-1 |
| LINK_BMODE* |
|
|
0=仅计算正常螺栓。 |
|
|
|
|
|
|
|
|
|
|
|
1=OK和NOK螺栓都是 |
|
|
|
|
|
计数。 |
|
| JOB_BSIZE* |
Word, Short |
Read Only |
作业批量大小。 |
0-9999 |
| LINK_BSIZE* |
|
|
|
|
| JOB_BCOUNT* |
Word, Short |
Read Only |
作业批处理计数器。 |
0-9999 |
| LINK_BCOUNT* |
|
|
|
|
| JOB_TIME* |
String |
Read Only |
作业信息的时间戳。 |
19 |
| LINK_TIME* |
|
|
|
characters |
| JOB_NEWDATA |
Boolean |
Read/Write |
新数据标志。新数据时设置为1 |
0-1 |
| LINK_NEWDATA |
|
|
到达。将0写入此标志以清除它。 |
|
| JOB_RESTART |
Word, Short |
Write Only |
将作业编号写入此项目以重新启动 |
0-99 |
| LINK_RESTART |
|
|
那份工作。 |
|
| JOB_ABORT |
Boolean |
Write Only |
将任何值写入此项以中止 |
N/A |
| LINK_ABORT |
|
|
当前工作。 |
|
*此项仅受开放协议模型支持。
------------------------------------------
命令集:作业编号数据 Job Number Data
某些命令集项也有别名。在下表中,如果适用,别名将列在项目下方。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
范围 |
| JOBN_COUNT |
Word, Short |
Read Only |
有效作业数的计数。 |
0-99 |
| LINKN_COUNT |
|
|
|
|
| JOBN_ID |
Word, Short* |
Read Only |
有效的工号(可用的编号为 |
0-99 |
| LINKN_ID |
|
|
由作业计数指定)。 |
|
*此项需要数组索引或位索引。有效的数组/位索引范围是1到99。
------------------------------------------
命令集:上次拧紧结果 Last Tightening Results
“上次拧紧结果”命令集用于接收上次拧紧的数据。
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
| LTR_CELL_ID |
Word, Short |
Read Only |
单元格ID。 |
0-9999 |
| LTR_CHAN_ID |
Word, Short |
Read Only |
频道ID。 |
0-99 |
| LTR_TC_NAME |
String |
Read Only |
转矩控制器名称。 |
25 |
|
|
|
|
|
characters |
| LTR_VIN |
String |
Read Only |
车辆识别号* |
25 |
|
|
|
|
|
characters |
| LTR_JOB |
Word, Short |
Read Only |
工作编号* |
0-99 (Rev 1) |
|
|
|
|
|
0-9999 |
|
|
|
|
|
(Rev 2+) |
| LTR_PSET |
Word, Short |
Read Only |
PSet编号* |
0-999 |
| LTR_BATCH_SIZE |
Word, Short |
Read Only |
批量大小* |
0-9999 |
| LTR_BATCH_ |
Word, Short |
Read Only |
批量计数器* |
0-9999 |
| COUNTER |
|
|
|
|
| LTR_TIGHT_ |
Word, Short |
Read Only |
拧紧状态。* |
0-1 |
| STATUS |
|
|
0=不合格 |
|
|
|
|
|
|
|
|
|
|
|
1=正常 |
|
| LTR_TORQUE_ |
Word, Short |
Read Only |
扭矩状态。* |
0-2 |
| STATUS |
|
|
0=低 |
|
|
|
|
|
|
|
|
|
|
|
1=正常 |
|
|
|
|
|
2=高 |
|
| LTR_ANGLE_ |
Word, Short |
Read Only |
角度状态* |
0-2 |
| STATUS |
|
|
0=低 |
|
|
|
|
|
|
|
|
|
|
|
1=正常 |
|
|
|
|
|
2=高 |
|
| LTR_TORQUE_MIN |
Float |
Read Only |
扭矩下限。 |
0-9999.99 |
| LTR_TORQUE_MAX |
Float |
Read Only |
扭矩最大限制。 |
0-9999.99 |
| LTR_TORQUE_ |
Float |
Read Only |
扭转最终目标。 |
0-9999.99 |
| TARGET |
|
|
|
|
| LTR_TORQUE_ |
Float |
Read Only |
扭矩值* |
0-9999.99 |
| VALUE |
|
|
|
|
| LTR_ANGLE_MIN |
DWord |
Read Only |
角度最小值,以度为单位。 |
0-99999 |
| LTR_ANGLE_MAX |
DWord |
Read Only |
角度最大值,以度为单位。 |
0-99999 |
| LTR_ANGLE_ |
DWord, Long |
Read Only |
目标角度值,以度为单位。 |
0-99999 |
| TARGET |
|
|
|
|
| LTR_ANGLE_VALUE |
DWord, Long |
Read Only |
转弯角度值,以度为单位* |
0-99999 |
| LTR_TIMESTAMP |
String |
Read Only |
时间戳* |
19 |
|
|
|
|
|
characters |
| LTR_CHANGETIME |
String |
Read Only |
上次更改PSet设置* |
19 |
|
|
|
|
|
characters |
|
|
|
|
|
|
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
|
| LTR_BATCH_STATUS |
Word, Short |
Read Only |
批次状态* |
0-2 |
|
|
|
|
|
0=不合格 |
|
|
|
|
|
|
|
||
|
|
|
|
1=正常 |
|
|
|
|
|
|
2=批次未使用 |
|
|
| LTR_ID |
DWord, Long |
Read/Write** |
拧紧ID* |
0- |
|
|
|
|
|
|
|
4294967295 |
| LTR_STRATEGY |
Word, Short |
Read Only |
(第2版)战略 |
0-99 |
|
|
|
|
|
1 |
=转矩控制 |
|
|
|
|
|
2 |
=转矩控制/角度监控 |
|
|
|
|
|
3 |
=转矩控制/角度控制与。 |
|
|
|
|
|
4 |
=角度控制/扭矩监控 |
|
|
|
|
|
5 |
= DS控制 |
|
|
|
|
|
6 |
= DS控制扭矩监控 |
|
|
|
|
|
7 |
=反向角度 |
|
|
|
|
|
8 |
=反向扭矩 |
|
|
|
|
|
9 |
=单击扳手 |
|
|
|
|
|
10=向前旋转主轴。 |
|
|
|
|
|
|
11=扭矩控制角度控制或。 |
|
|
|
|
|
|
12=反向旋转主轴。 |
|
|
|
|
|
|
99=没有策略。 |
|
|
| LTR_STRAT_OPT |
Boolean |
Read Only |
(第2版)战略选择。 |
0-1 |
|
|
|
|
|
此项需要位号(015) |
|
|
|
|
|
|
位0=扭矩。 |
|
|
|
|
|
|
位1 =角度。 |
|
|
|
|
|
|
位2 =批次。 |
|
|
|
|
|
|
Bit 3=PVT监控。 |
|
|
|
|
|
|
位4=PVT补偿。 |
|
|
|
|
|
|
位5 =自拍。 |
|
|
|
|
|
|
位6 =停机。 |
|
|
|
|
|
|
位7=CM。 |
|
|
|
|
|
|
Bit 8=DS控制。 |
|
|
|
|
|
|
位9 =单击扳手。 |
|
|
|
|
|
|
Bit 10=RBW监控。 |
|
|
| LTR_RDA_STATUS |
Word, Short |
Read Only |
(第2版)减速角状态。 |
0-2 |
|
|
|
|
|
0=不合格 |
|
|
|
|
|
|
1=正常 |
|
|
|
|
|
|
2=高 |
|
|
| LTR_CMON_STATUS |
Word, Short |
Read Only |
(版本2)当前监控状态。 |
0-2 |
|
|
|
|
|
0=不合格 |
|
|
|
|
|
|
|
||
|
|
|
|
1=正常 |
|
|
|
|
|
|
2=高 |
|
|
| LTR_ST_STATUS |
Word, Short |
Read Only |
(版本2)自拍状态。 |
0-2 |
|
|
|
|
|
0=不合格 |
|
|
|
|
|
|
1=正常 |
|
|
|
|
|
|
2=高 |
|
|
| LTR_PTM_STATUS |
Word, Short |
Read Only |
(版本2)扭矩监控状态优先。 |
0-2 |
|
|
|
|
|
|
0=不合格 |
|
|
|
|
|
|
1=正常 |
|
|
|
|
|
|
2=高 |
|
| LTR_PTC_STATUS |
Word, Short |
Read Only |
(版本2)优先转矩补偿状态。 |
0-2 |
|
|
|
|
|
|
0=不合格 |
|
|
|
|
|
|
1=正常 |
|
|
|
|
|
|
2=高 |
|
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
| LTR_PVT |
Float |
Read Only |
(第6版)PVT补偿值。 |
0-99999.99 |
| LTR_TERR_STATUS |
Boolean |
Read Only |
(版本2)拧紧错误状态。 |
0-1 |
|
|
|
|
此项需要位号(031) |
|
|
|
|
|
位0最大下降角关闭。 |
|
|
|
|
|
运行位关闭1分钟。 |
|
|
|
|
|
位2最大扭矩关闭。 |
|
|
|
|
|
第3位最大角度关闭。 |
|
|
|
|
|
位4自攻扭矩最大值关掉 |
|
|
|
|
|
位5自攻扭矩最小值关掉 |
|
|
|
|
|
位6最大保护转矩关掉 |
|
|
|
|
|
位7最小转矩关掉 |
|
|
|
|
|
位8优先转矩补偿溢出。 |
|
|
|
|
|
位9 =电流监控最大关闭。 |
|
|
|
|
|
Bit 10=后视扭矩最小扭矩 |
|
|
|
|
|
关掉。 |
|
|
|
|
|
位11 =后视图最大扭矩扭力 |
|
|
|
|
|
关掉。 |
|
|
|
|
|
Bit 12=后视扭矩角太小。 |
|
|
|
|
|
位13 =触发器丢失。 |
|
|
|
|
|
位14 =扭矩小于目标值。 |
|
|
|
|
|
位15 =工具热。 |
|
|
|
|
|
位16 =多级中止。 |
|
|
|
|
|
位17 =重击。 |
|
|
|
|
|
Bit 18=DS测量失败。 |
|
|
|
|
|
位19 =达到电流限制。 |
|
|
|
|
|
位20 =结束超时关闭。 |
|
|
|
|
|
位21 =超出紧固件的限制。 |
|
|
|
|
|
位22 =禁用驱动器。 |
|
| LTR_TERR_STATUS2 |
Boolean |
Read Only |
(版本6)拧紧错误状态2。 |
0-1 |
|
|
|
|
此项需要位号(031) |
|
|
|
|
|
|
|
|
|
|
|
位0驱动器停用。 |
|
|
|
|
|
位1工具停转。 |
|
|
|
|
|
第2位驱动热。 |
|
|
|
|
|
位3渐变监视高。 |
|
|
|
|
|
位4梯度监测低。 |
|
|
|
|
|
位5反作用杆失效。 |
|
|
|
|
|
位631保留。 |
|
| LTR_RDA_MIN |
DWord, Long |
Read Only |
(第2版)减速角最小值, |
0-99999 |
|
|
|
|
以度为单位。 |
|
| LTR_RDA_MAX |
DWord, Long |
Read Only |
(第2版)减速角最大值, |
0-99999 |
|
|
|
|
以度为单位。 |
|
| LTR_RDA_VALUE |
DWord, Long |
Read Only |
(第2版)达到减速角值,英寸 |
0-99999 |
|
|
|
|
度。 |
|
| LTR_CM_MIN |
Word, Short |
Read Only |
(版本2)最小电流监测 |
0-999 |
|
|
|
|
限制。 |
|
| LTR_CM_MAX |
Word, Short |
Read Only |
(版本2)电流监测最大值 |
0-999 |
|
|
|
|
限制。 |
|
| LTR_CM_VALUE |
Word, Short |
Read Only |
(版本2)当前监控值 |
0-999 |
|
|
|
|
百分比。 |
|
| LTR_ST_MIN |
Float |
Read Only |
(第2版)自拍最小限值。 |
0-9999.99 |
| LTR_ST_MAX |
Float |
Read Only |
(第2版)自拍最大限制。 |
0-9999.99 |
| LTR_ST_TORQUE |
Float |
Read Only |
(第2版)自攻扭矩。 |
0-9999.99 |
| LTR_PTM_MIN |
Float |
Read Only |
(版本2)优先转矩监控 |
0-9999.99 |
|
|
|
|
最低限度。 |
|
| LTR_PTM_MAX |
Float |
Read Only |
(版本2)优先转矩监控 |
0-9999.99 |
|
|
|
|
最大限度。 |
|
| LTR_PT |
Float |
Read Only |
(版本2)以扭矩值为准。 |
0-9999.99 |
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
|
| LTR_JOB_SEQ_ |
Word, Short |
Read Only |
(版本2)作业序列号。 |
0-65535 |
|
| NUM |
|
|
|
|
|
| LTR_STID |
Word, Short |
Read Only |
(版本2)同步拧紧ID。 |
0-65535 |
|
| LTR_SERIAL_NUM |
String |
Read Only |
(版本2)工具序列号。 |
14 |
|
|
|
|
|
|
characters |
字符 |
| LTR_PSET_NAME |
String |
Read Only |
(版本3)参数集名称。 |
25 |
|
|
|
|
|
|
characters |
字符 |
| LTR_UNITS |
Word, Short |
Read Only |
(第3版)扭矩值单位。 |
1-4 |
|
|
|
|
|
1 |
= Nm |
|
|
|
|
|
2 |
= Lbf.ft |
|
|
|
|
|
3 |
= Lbf.In |
|
|
|
|
|
4 |
= Kpm |
|
| LTR_RESULT_TYPE |
Word, Short |
Read Only |
(版本3)结果类型。 |
1-7 |
|
|
|
|
|
1 |
= Tightening. |
|
|
|
|
|
2 |
= Loosening. |
|
|
|
|
|
3 |
= Batch Increment. |
|
|
|
|
|
4 |
= Batch decrement. |
|
|
|
|
|
5 |
= Bypass pset result. |
|
|
|
|
|
6 |
= Abort job result. |
|
|
|
|
|
7 |
= Sync tightening. |
|
| LTR_IDR2 |
String |
Read Only |
(第4版)标识符结果第2部分。 |
25 |
|
|
|
|
|
|
characters |
字符 |
| LTR_IDR3 |
String |
Read Only |
(第4版)标识符结果第3部分。 |
25 |
|
|
|
|
|
|
characters |
字符 |
| LTR_IDR4 |
String |
Read Only |
(第4版)标识符结果第4部分。 |
25 |
|
|
|
|
|
|
characters |
字符 |
| LTR_CUSTOM_ERR |
String |
Read Only |
(版本5)客户拧紧错误代码。 |
4 characters |
|
| LTR_NEWDATA |
Boolean |
Read/Write |
新数据标志。新数据时设置为1 |
0-1 |
|
|
|
|
|
到达。将0写入此标志以清除。 |
|
*这些项目在低带宽(修订版999)消息中提供。
**将任何值写入拧紧ID会将驱动程序中的值设置为0。这对硬件没有任何影响。
注意:FEP 协议模型不支持任何需要特殊修订的命令(例如2、3等)。
------------------------------------------
命令集:多轴结果 Multi Spindle Results
主轴结果电报可用于接收数据,包括具有多个主轴的刀具的拧紧结果。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
|
范围 |
|
| MS_NUMBER |
Word, Short |
Read Only |
运行主轴数。 |
2-10 |
|
| MS_VIN |
String |
Read Only |
车辆识别号。 |
25 |
|
|
|
|
|
|
characters |
|
| MS_JOBNUM |
Word, Short |
Read Only |
作业编号(链接组)。 |
0-99 |
|
| MS_PSET |
Word, Short |
Read Only |
参数集(App)。 |
0-999 |
|
| MS_BSIZE* |
Word, Short |
Read Only |
批量大小。 |
0-9999 |
|
| MS_BCOUNT* |
Word, Short |
Read Only |
批量计数器。 |
0-9999 |
|
| MS_BSTATUS* |
Word, Short |
Read Only |
批次状态 |
|
|
|
|
|
|
0=不合格 |
|
|
|
|
|
|
1=正常 |
|
|
|
|
|
|
2=批次未使用。 |
|
|
| MS_TMIN |
Float |
Read Only |
扭矩下限。 |
0- |
|
|
|
|
|
|
9999.99 |
|
| MS_TMAX |
Float |
Read Only |
扭矩最大限制。 |
0- |
|
|
|
|
|
|
|
|
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
|
|
范围 |
|
|
|
|
|
|
9999.99 |
| MS_TTARG |
Float |
Read Only |
扭转最终目标。 |
0- |
|
|
|
|
|
|
|
9999.99 |
| MS_AMIN |
DWord, Long |
Read Only |
角度最小限制。 |
0-99999 |
|
| MS_AMAX |
DWord, Long |
Read Only |
角度最大限制。 |
0-99999 |
|
| MS_ATARG |
DWord, Long |
Read Only |
角度最终目标。 |
0-99999 |
|
| MS_CHANGETIME |
String |
Read Only |
最后一次改变设置。 |
19 |
|
|
|
|
|
|
characters |
字符 |
| MS_TIME |
String |
Read Only |
时间戳。 |
19 |
|
|
|
|
|
|
characters |
字符 |
| MS_SYNCID |
DWord, Long |
Read Only |
同步拧紧ID。 |
0-99999 |
|
| MS_SYNCSTAT |
Word, Short |
Read Only |
整体拧紧状态。 |
0-1 |
|
|
|
|
|
0 |
= NOK |
|
|
|
|
|
1 |
= OK |
|
| SPD_NUM** |
Word, Short |
Read Only |
主轴编号。 |
1-10 |
|
| SPD_CHAN** |
Word, Short |
Read Only |
频道ID |
1-20 |
|
| SPD_STATUS** |
Word, Short |
Read Only |
整体主轴状态 |
0-1 |
|
|
|
|
|
0 |
= NOK |
|
|
|
|
|
1 |
= OK |
|
| SPD_TSTATUS** |
Word, Short |
Read Only |
单个扭矩状态。 |
0-1 |
|
|
|
|
|
0 |
= NOK |
|
|
|
|
|
1 |
= OK |
|
| SPD_TORQUE** |
Float |
Read Only |
单个扭矩。 |
0- |
|
|
|
|
|
|
9999.99 |
9999.99 |
| SPD_ASTATUS** |
Word, Short |
Read Only |
单个角度状态。 |
0-1 |
|
|
|
|
|
0 |
= NOK |
|
|
|
|
|
1 |
= OK |
|
| SPD_ANGLE** |
DWord, Long |
Read Only |
个别角度。 |
0-99999 |
|
| MS_NEWDATA |
Boolean |
Read/Write |
新数据标志。新数据时设置为1 |
0-1 |
|
|
|
|
|
到达。将0写入此标志以清除它。 |
|
*尽管开放协议不支持这一点,但Torque工具以太网驱动程序支持此功能。通过在地址项前面加上以“:”分隔的轴号来支持此功能(例如01:VIN)。对于开放协议,主轴数据被忽略。
**此项需要数组索引。最大数组索引由MS_数给出。
------------------------------------------
命令集:旧的拧紧结果 Old Tightening Results
旧的拧紧结果命令集用于检索旧拧紧的数据。要检索拧紧数据,请将拧紧ID写入OTR_ID字段。
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
| OTR_ID |
DWord, Long |
Read/Write |
拧紧ID。写入拧紧ID |
0- |
|
|
|
|
以检索该项的数据 |
4294967295 |
|
|
|
|
拧紧。写入0将检索 |
|
|
|
|
|
上次拧紧结果。 |
|
| OTR_VIN |
String |
Read Only |
车辆识别号。 |
25 |
|
|
|
|
|
characters |
| OTR_PSET |
Word, Short |
Read Only |
PSet编号。 |
0-999 |
| OTR_BCOUNT |
Word, Short |
Read Only |
批量计数器。 |
0-9999 |
| OTR_TIGHTSTAT |
Word, Short |
Read Only |
拧紧状态。 |
0-1 |
|
|
|
|
0=不合格 |
|
|
|
|
|
1=正常 |
|
| OTR_TORQSTAT |
Word, Short |
Read Only |
扭矩状态。 |
0-2 |
|
|
|
|
|
|
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
|
|
|
|
|
0 |
=低 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=高 |
|
| OTR_ANGSTAT |
Word, Short |
Read Only |
角度状态。 |
0-2 |
|
|
|
|
|
0 |
=低 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=高 |
|
| OTR_TORQUE |
Float |
Read Only |
扭矩值。 |
0-9999.99 |
|
| OTR_ANGLE |
DWord, Long |
Read Only |
转角值,以度为单位。 |
0-99999 |
|
| OTR_TIME |
String |
Read Only |
时间戳。 |
19 |
|
|
|
|
|
|
|
characters |
| OTR_BATSTAT |
Word, Short |
Read Only |
批次状态。 |
0-2 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=批次未使用 |
|
| OTR_JOBNUM |
Word, Short |
Read Only |
(第2版)作业编号。 |
0-9999 |
|
| OTR_STRATEGY |
Word, Short |
Read Only |
(第2版)战略。 |
0-99 |
|
|
|
|
|
1 |
=扭矩控制。 |
|
|
|
|
|
2 |
=扭矩控制/角度监控。 |
|
|
|
|
|
三 |
=扭矩控制/角度控制和。 |
|
|
|
|
|
4 |
=角度控制/扭矩监控。 |
|
|
|
|
|
5 |
=DS控制。 |
|
|
|
|
|
6 |
=DS控制扭矩监控。 |
|
|
|
|
|
7 |
=反向角度。 |
|
|
|
|
|
8 |
=反向扭矩。 |
|
|
|
|
|
9 |
=卡扣扳手。 |
|
|
|
|
|
10=向前旋转主轴。 |
|
|
|
|
|
|
11=扭矩控制角度控制或。 |
|
|
|
|
|
|
12=反向旋转主轴。 |
|
|
|
|
|
|
99=没有策略。 |
|
|
| OTR_STROPT |
Boolean |
Read Only |
(第2版)战略选择。 |
0-1 |
|
|
|
|
|
此项需要位号(015)。 |
|
|
|
|
|
|
位0=扭矩。 |
|
|
|
|
|
|
位1 =角度。 |
|
|
|
|
|
|
位2 =批次。 |
|
|
|
|
|
|
Bit 3=PVT监控。 |
|
|
|
|
|
|
位4=PVT补偿。 |
|
|
|
|
|
|
位5 =自拍。 |
|
|
|
|
|
|
位6 =停机。 |
|
|
|
|
|
|
位7=CM。 |
|
|
|
|
|
|
Bit 8=DS控制。 |
|
|
|
|
|
|
位9 =单击扳手。 |
|
|
|
|
|
|
Bit 10=RBW监控。 |
|
|
| OTR_BSIZE |
Word, Short |
Read Only |
(第2版)批量大小。 |
0-9999 |
|
| OTR_RASTAT |
Word, Short |
Read Only |
(第2版)减速角状态。 |
0-2 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=高 |
|
| OTR_CMSTAT |
Word, Short |
Read Only |
(版本2)当前监控状态。 |
0-2 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=高 |
|
| OTR_STSTAT |
Word, Short |
Read Only |
(版本2)自拍状态。 |
0-2 |
|
|
|
|
|
|
|
|
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=高 |
|
| OTR_PTMSTAT |
Word, Short |
Read Only |
(版本2)扭矩监控状态优先。 |
0-2 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=高 |
|
| OTR_PTCSTAT |
Word, Short |
Read Only |
(版本2)优先转矩补偿状态。 |
0-2 |
|
|
|
|
|
0 |
=不合格 |
|
|
|
|
|
1 |
=好的 |
|
|
|
|
|
2 |
=高 |
|
| OTR_TERRSTAT |
Boolean |
Read Only |
(版本2)拧紧错误状态。 |
0-1 |
|
|
|
|
|
此项需要位号(031) |
|
|
|
|
|
|
位0 =下倾角最大关闭。 |
|
|
|
|
|
|
位1 =下降角最小关闭。 |
|
|
|
|
|
|
位2 =最大扭矩关闭。 |
|
|
|
|
|
|
位3 =最大角度关闭。 |
|
|
|
|
|
|
位4 =自攻扭矩最大关闭。 |
|
|
|
|
|
|
Bit 5=自攻扭矩最小关闭。 |
|
|
|
|
|
|
位6 =最大转矩关闭。 |
|
|
|
|
|
|
位7 =最小预紧扭矩。 |
|
|
|
|
|
|
位8 =预转矩补偿 |
|
|
|
|
|
|
溢出。 |
|
|
|
|
|
|
位9 =电流监控最大关闭。 |
|
|
|
|
|
|
Bit 10=后视扭矩最小扭矩关闭 |
|
|
|
|
|
|
关闭。 |
|
|
|
|
|
|
Bit 11=后视扭矩最大扭矩关闭 |
|
|
|
|
|
|
关闭。 |
|
|
|
|
|
|
Bit 12=后视扭矩角太小。 |
|
|
|
|
|
|
位13 =触发丢失。 |
|
|
|
|
|
|
位14 =扭矩小于目标。 |
|
|
|
|
|
|
位15 =工具热。 |
|
|
|
|
|
|
位16 =多级中止。 |
|
|
|
|
|
|
位17 =重击。 |
|
|
|
|
|
|
Bit 18=DS测量失败。 |
|
|
|
|
|
|
位19 =达到电流限制。 |
|
|
|
|
|
|
位20 =结束超时关闭。 |
|
|
|
|
|
|
位21 =超出紧固件的限制。 |
|
|
|
|
|
|
位22 =禁用驱动器。 |
|
|
| OTR_RANGLE |
DWord, Long |
Read Only |
(第2版)达到减速角值,英寸 |
0-99999 |
|
|
|
|
|
度。 |
|
|
| OTR_CMVALUE |
Word, Short |
Read Only |
(版本2)当前监控值 |
0-999 |
|
|
|
|
|
百分比。 |
|
|
| OTR_STORQUE |
Float |
Read Only |
(第2版)自攻扭矩。 |
0-9999.99 |
|
| OTR_PTORQUE |
Float |
Read Only |
(版本2)以扭矩值为准。 |
0-9999.99 |
|
| OTR_JOBSEQ |
Word, Short |
Read Only |
(版本2)作业序列号。 |
0-65535 |
|
| OTR_STID |
Word, Short |
Read Only |
(版本2)同步拧紧ID。 |
0-65535 |
|
| OTR_SERIAL |
String |
Read Only |
(版本2)工具序列号。 |
14 |
|
|
|
|
|
|
|
characters |
| OTR_TVUNIT |
Word, Short |
Read Only |
(第3版)扭矩值单位。 |
1-4 |
|
|
|
|
|
1 |
=牛米 |
|
|
|
|
|
2 |
= 磅英尺 |
|
|
|
|
|
3 |
= 磅力英寸 |
|
|
|
|
|
4 |
=Kpm |
|
| OTR_RTYPE |
Word, Short |
Read Only |
(版本3)结果类型。 |
1-7 |
|
|
|
|
|
1 |
=拧紧。 |
|
|
|
|
|
|
|
|
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
|
|
|
|
|
2 |
=松动。 |
|
|
|
|
|
3 |
=批次增量。 |
|
|
|
|
|
4 |
=批量减量。 |
|
|
|
|
|
5 |
=旁路pset结果。 |
|
|
|
|
|
6 |
=中止作业结果。 |
|
|
|
|
|
7 |
=同步拧紧。 |
|
| OTR_ID2 |
String |
Read Only |
(第4版)标识符结果第2部分。 |
25 |
|
|
|
|
|
|
|
characters |
| OTR_ID3 |
String |
Read Only |
(第4版)标识符结果第3部分。 |
25 |
|
|
|
|
|
|
|
characters |
| OTR_ID4 |
String |
Read Only |
(第4版)标识符结果第4部分。 |
25 |
|
|
|
|
|
|
|
characters |
注意:FEP 协议模型不支持任何需要特殊修订的命令(例如2、3等)。
------------------------------------------
命令集:参数集数据 Parameter Set Dat
参数集数据命令集用于按需检索特定命令集的数据。要检索命令集的数据,请将命令集编号写入PSD_ID项目。
注意:某些命令集项也具有别名。在下表中,别名将在下面列出 适用的项目。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
范围 |
| PSD_ID |
Word, Short |
Read/Write |
参数集ID。写入 |
0-999 |
| APPD_ID |
|
|
此项的所需参数设置为 |
|
|
|
|
|
检索该参数集的数据。 |
|
| PSD_NAME |
String |
Read Only |
参数集的名称。 |
25 |
| APPD_NAME |
|
|
|
characters |
| PSD_DIR |
Word, Short |
Read Only |
旋转方向。 |
1-2 |
| APPD_DIR |
|
|
1=顺时针。 |
|
|
|
|
|
|
|
|
|
|
|
2=逆时针。 |
|
| PSD_BSIZE |
Word, Short |
Read Only |
批量大小。 |
0-99 |
| APPD_BSIZE |
|
|
|
|
| PSD_TMIN |
Float |
Read Only |
扭矩下限。 |
0- |
| APPD_TMIN |
|
|
|
9999.99 |
| PSD_TMAX |
Float |
Read Only |
扭矩最大限制。 |
0- |
| APPD_TMAX |
|
|
|
9999.99 |
| PSD_TTARG |
Float |
Read Only |
扭矩最终目标值。 |
0- |
| APPD_TTARG |
|
|
|
9999.99 |
| PSD_AMIN |
Word, Short |
Read Only |
角度最小值(度)。 |
0-99999 |
| APPD_AMIN |
|
|
|
|
| PSD_AMAX |
Word, Short |
Read Only |
角度最大值(度)。 |
0-99999 |
| APPD_AMAX |
|
|
|
|
| PSD_ATARG |
Word, Short |
Read Only |
目标角度(度)。 |
0-99999 |
| APPD_ATARG |
|
|
|
|
------------------------------------------
命令集:参数集编号 Parameter Set Numbers
参集编号命令集用于从设备检索参数集编号列表。
注意:某些命令集项也具有别名。在下表中,别名将在下面列出 适用的项目。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
范围 |
| PSN_COUNT |
Word, Short* |
Read Only |
列表中参数集的数目。 |
0-999 |
| APPN_COUNT |
|
|
|
|
|
|
|
|
|
|
| PSN_ID APPN_ID |
Word, Short* |
Read Only |
参数集ID。数组大小为 由PSN_计数定义。 项需要数组索引 (1999)。 |
0-999 |
*此项需要数组索引或位索引。
------------------------------------------
命令集:选定的参数集 Parameter Set Selecte
参数集所选命令集用于选择特定的命令集,在选择新命令集时通知用户,并控制某些批处理参数。
注意:某些命令集项也具有别名。在下表中,别名将在下面列出 适用的项目。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
范围 |
| PSET_NUMBER |
Word, Short |
Read/Write |
最后一个参数集的ID号 |
0-999 |
| APP_NUMBER |
|
|
已选择。用户也可以写一个参数 |
|
|
|
|
|
为此项设置数字以选择参数 |
|
|
|
|
|
设置。 |
|
| PSET_LASTCHANGE |
String |
Read Only |
上次更改PSet设置的时间。 |
19 |
| APP_LASTCHANGE |
|
|
|
characters |
| PSET_NEWDATA |
Boolean |
Read/Write |
新数据标志。新数据时设置为1 |
0-1 |
| APP_NEWDATA |
|
|
到达。将0写入此标志以清除它。 |
|
| PSET_BSIZE |
String |
Write Only |
使用此项设置 |
PSet: 0- |
| APP_BSIZE |
|
|
特定参数集。的格式 |
999 |
|
|
|
|
字符串为: |
Batch |
|
|
|
|
|
|
|
|
|
|
PSETNUM=批大小 |
Size: 0-99 |
|
|
|
|
其中PSETNUM是参数集 |
|
|
|
|
|
数字,并且需要BATCHSIZE |
|
|
|
|
|
批量大小。例如,设置批次 |
|
|
|
|
|
如果参数集3的大小为20,则用户将 |
|
|
|
|
|
将以下内容写入此标记。 |
|
|
|
|
|
3=20 |
|
| PSET_RESETBC |
Word, Short |
Write Only |
将参数集编号写入此项 |
0-999 |
| APP_RESETBC |
|
|
将为此重置批次计数器 |
|
|
|
|
|
参数设置。 |
|
------------------------------------------
命令集:时间 Time
时间命令集用于读取控制器的时间并与PC同步。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
|
|
|
|
范围 |
| TIME |
String |
Read Only |
控制器中的当前时间。 |
19 |
|
|
|
|
|
characters |
| TIME_SYNC |
Boolean |
Write Only |
将任何值写入此项以设置 |
N/A |
|
|
|
|
控制器的时间到当前PC时间。 |
|
------------------------------------------
命令集:刀具数据 Tool Dat
刀具数据命令集用于接收连接刀具的数据和启用/禁用刀具。
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
| TOOLDATA_ |
String |
Read Only |
工具序列号。 |
14 |
| TSERIAL |
|
|
|
character |
| 项目 |
数据类型 |
访问 |
说明 |
数据范围 |
| TOOLDATA_NT |
DWord, Long |
Read Only |
拧紧工具编号。 |
0- |
|
|
|
|
|
4294967295 |
| TOOLDATA_LCD |
String |
Read Only |
上次校准日期。 |
19 |
|
|
|
|
|
characters |
| TOOLDATA_ |
String |
Read Only |
控制器序列号。 |
10 |
| CSERIAL |
|
|
|
characters |
| TOOL_ENABLE |
Boolean |
Write Only |
写入0以禁用工具,或写入1以启用 |
0-1 |
|
|
|
|
工具。 |
|
| TOOLDATA_FWV1* |
String |
Read Only |
控制器固件版本。 |
10 |
|
|
|
|
|
characters |
| TOOLDATA_FWV2* |
String |
Read Only |
辅助固件版本 |
10 |
|
|
|
|
是第二个固件。 |
characters |
*此项仅受FEP协议模型支持。
------------------------------------------
命令集:VIN
VIN命令集用于接收有关VIN(车辆ID号)的数据。
| 项目 |
数据类型 |
访问 |
说明 |
数据 |
|
| 范围 |
|
||||
|
|
|
|
|
|
|
| VIN_VIN |
String |
读/写 |
车辆ID号。发送给 |
25 |
|
|
|
|
|
控制器,在此字段中输入VIN。 |
characters |
|
| VIN_VIN2 |
String |
只读 |
(第2版)标识符结果第3部分。 |
25 |
|
|
|
|
|
|
characters |
|
| VIN_VIN3 |
String |
只读 |
(第2版)标识符结果第3部分。 |
25 |
|
|
|
|
|
|
characters |
|
| VIN_VIN4 |
String |
只读 |
(第2版)标识符结果第3部分。 |
25 |
|
|
|
|
|
|
characters |
|
| VIN_NEWDATA |
Boolean |
读/写 |
新数据标志。新数据时设置为1 |
0-1 |
|
|
|
|
|
到达。将0写入此标志以清除它。 |
|
|
注意:FEP 协议模型不支持任何需要特殊修订的命令(例如2、3等)。
来源:oschina
链接:https://my.oschina.net/u/4518047/blog/4755752