一、使用STM32CubeMX生成工程
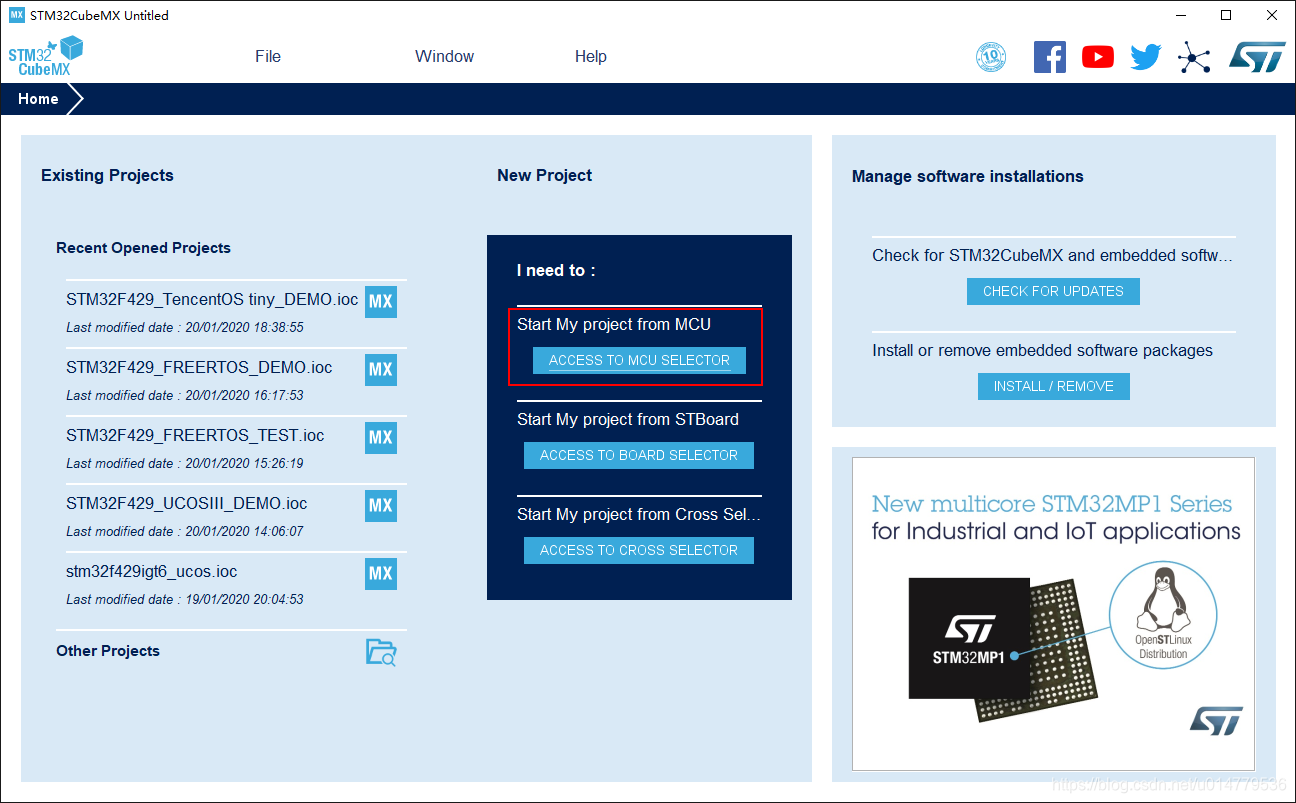
1. 打开软件

2. 基于芯片创建工程
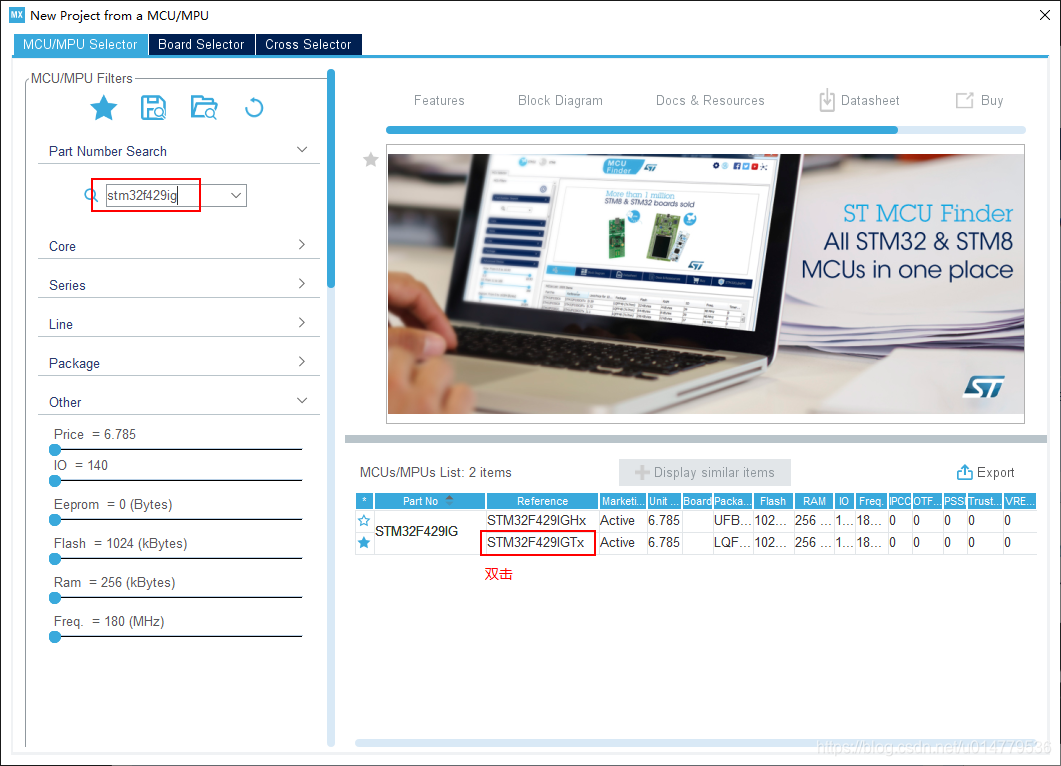
3. 选择对应芯片
- 此处我是采用的stm32f429igt6

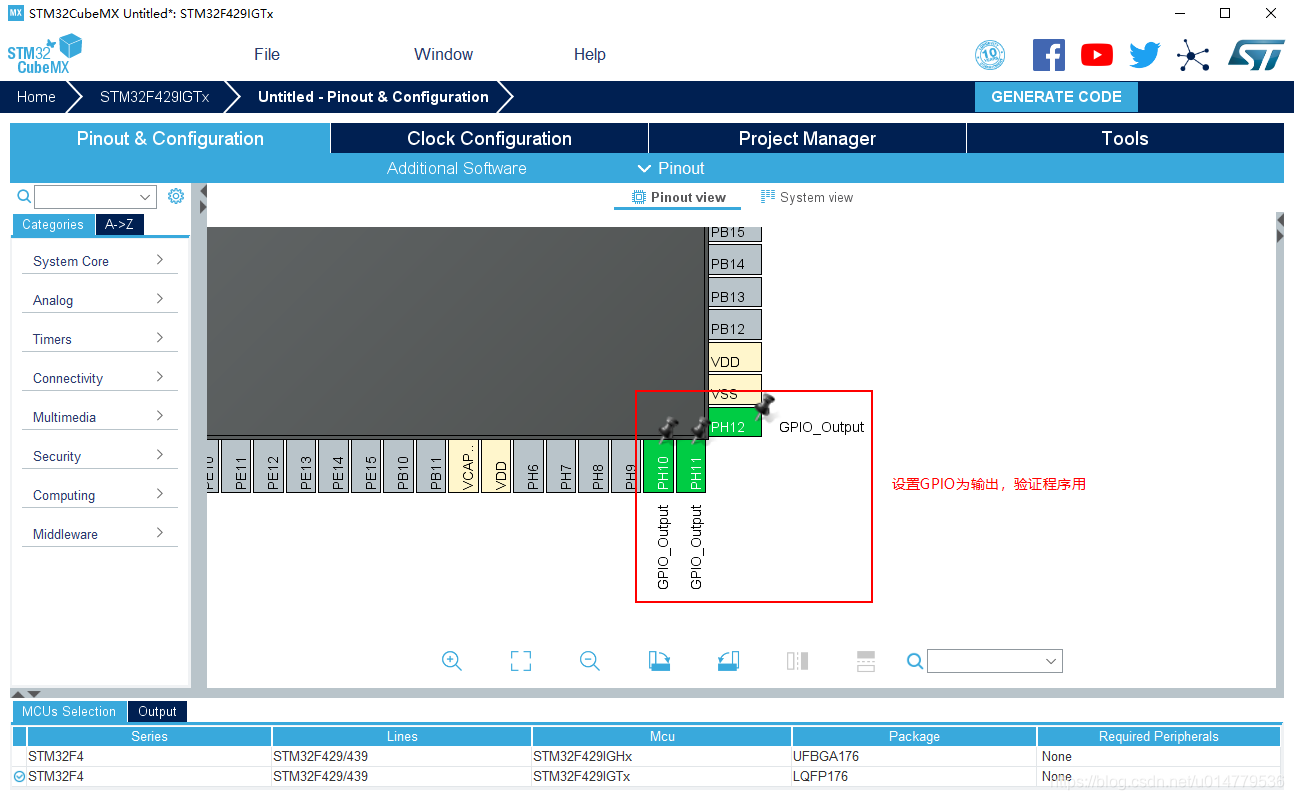
4. 设置GPIO
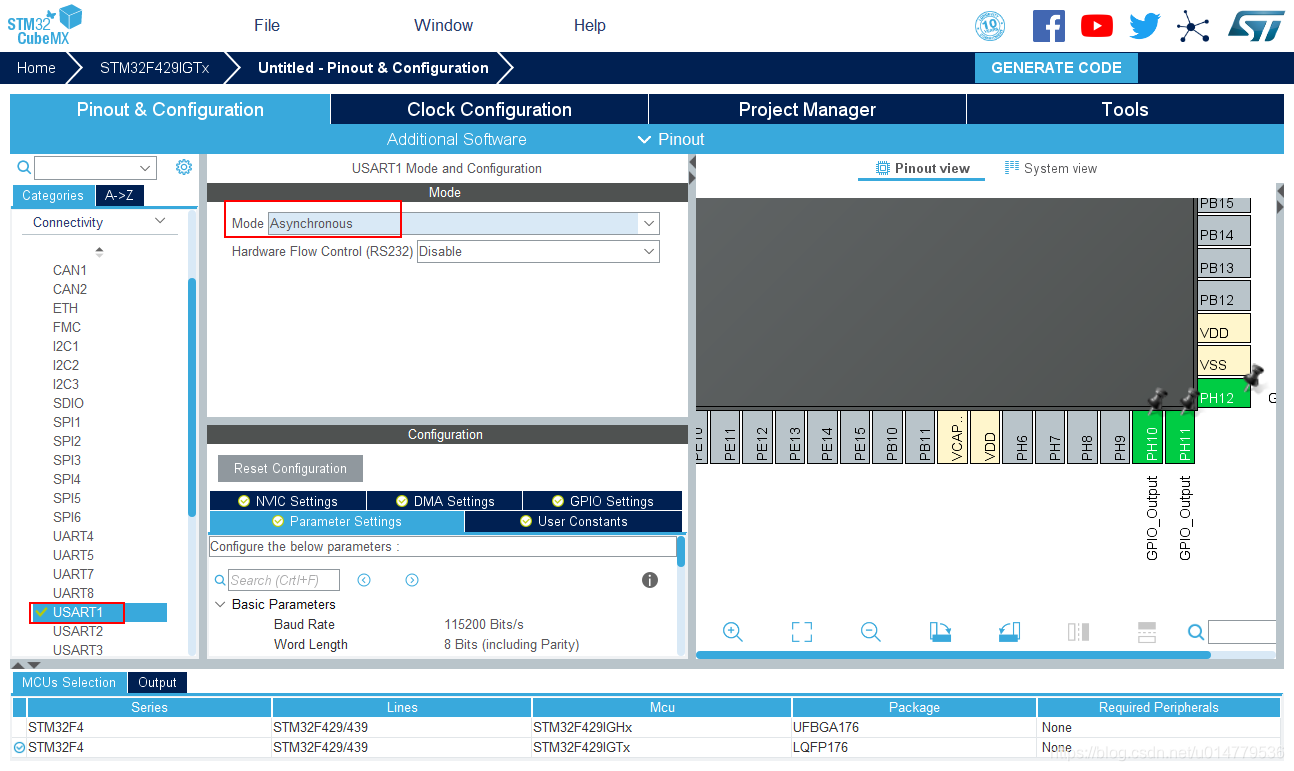
5. 设置串口
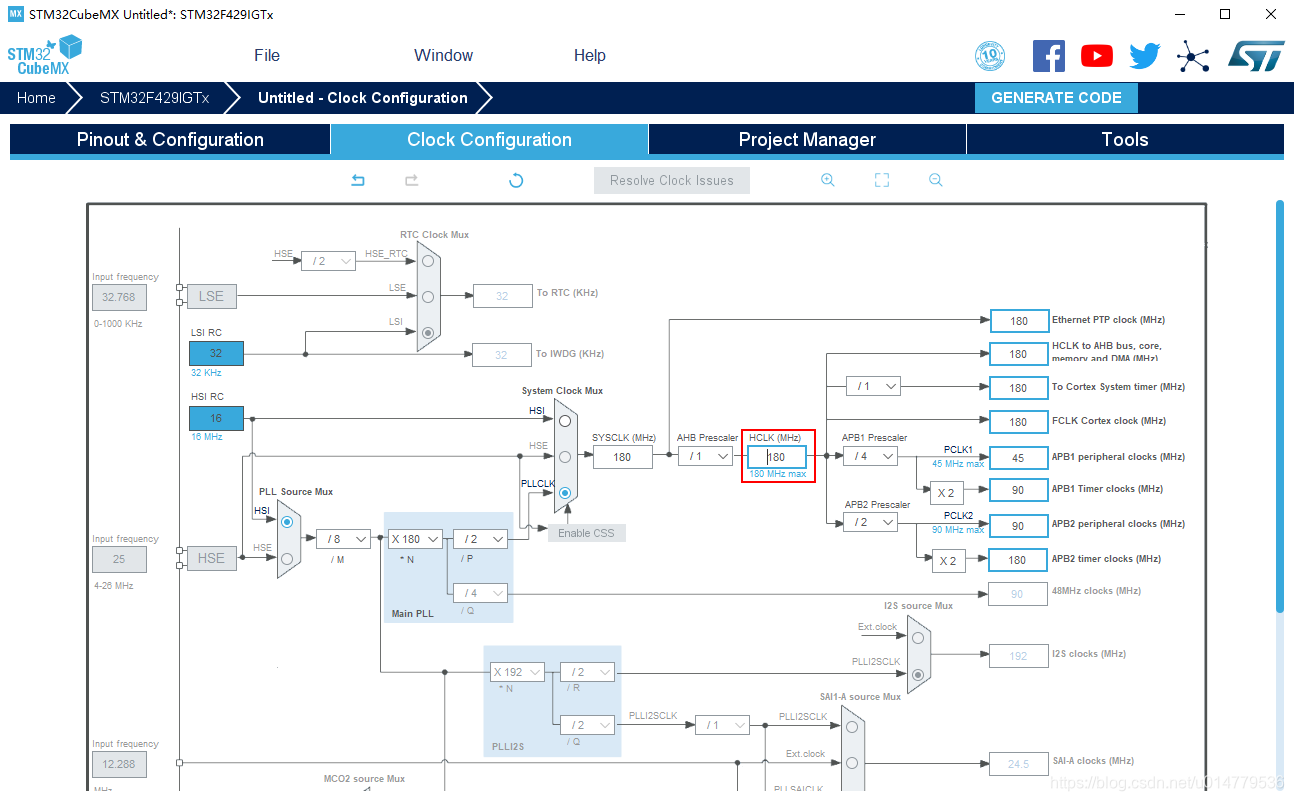
6. 设置时钟为180MHz
- 此处选用内部时钟,如需外部时钟请自定义配置
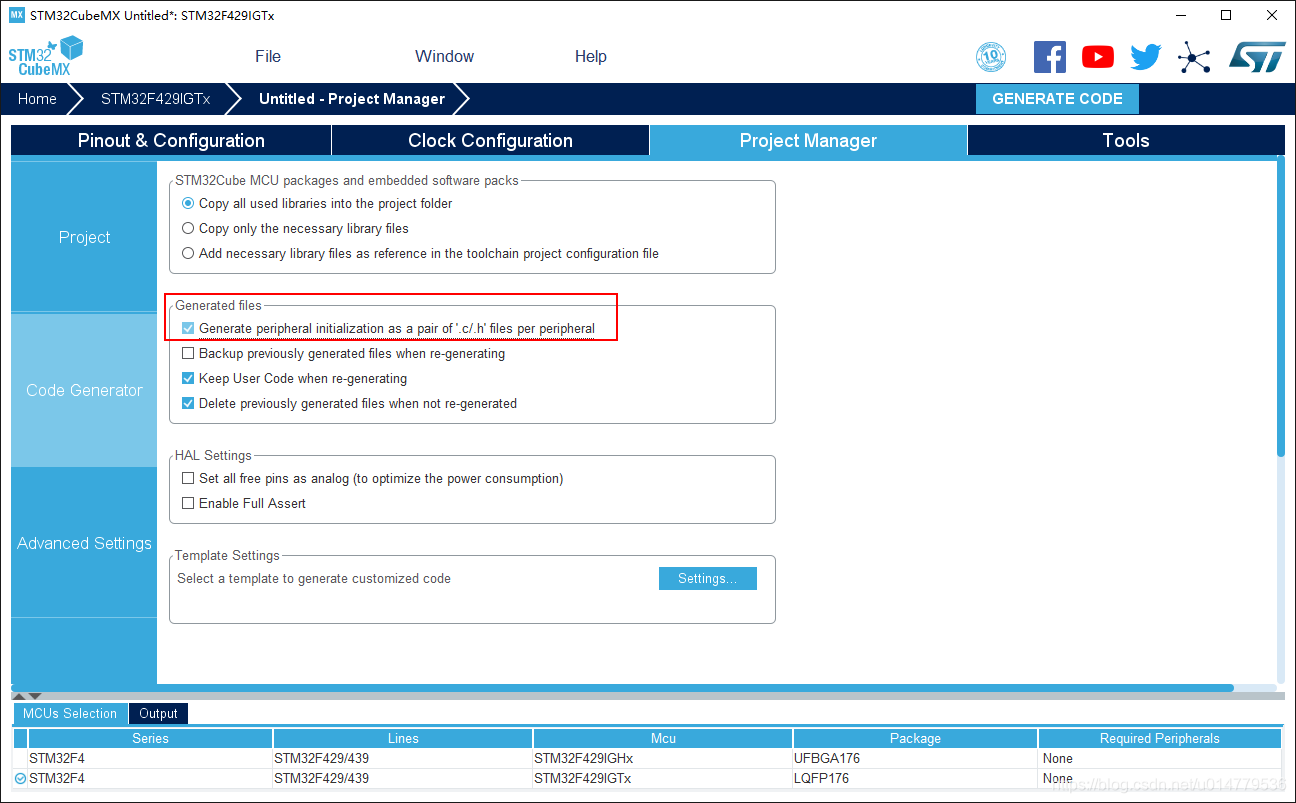
7. 工程设置
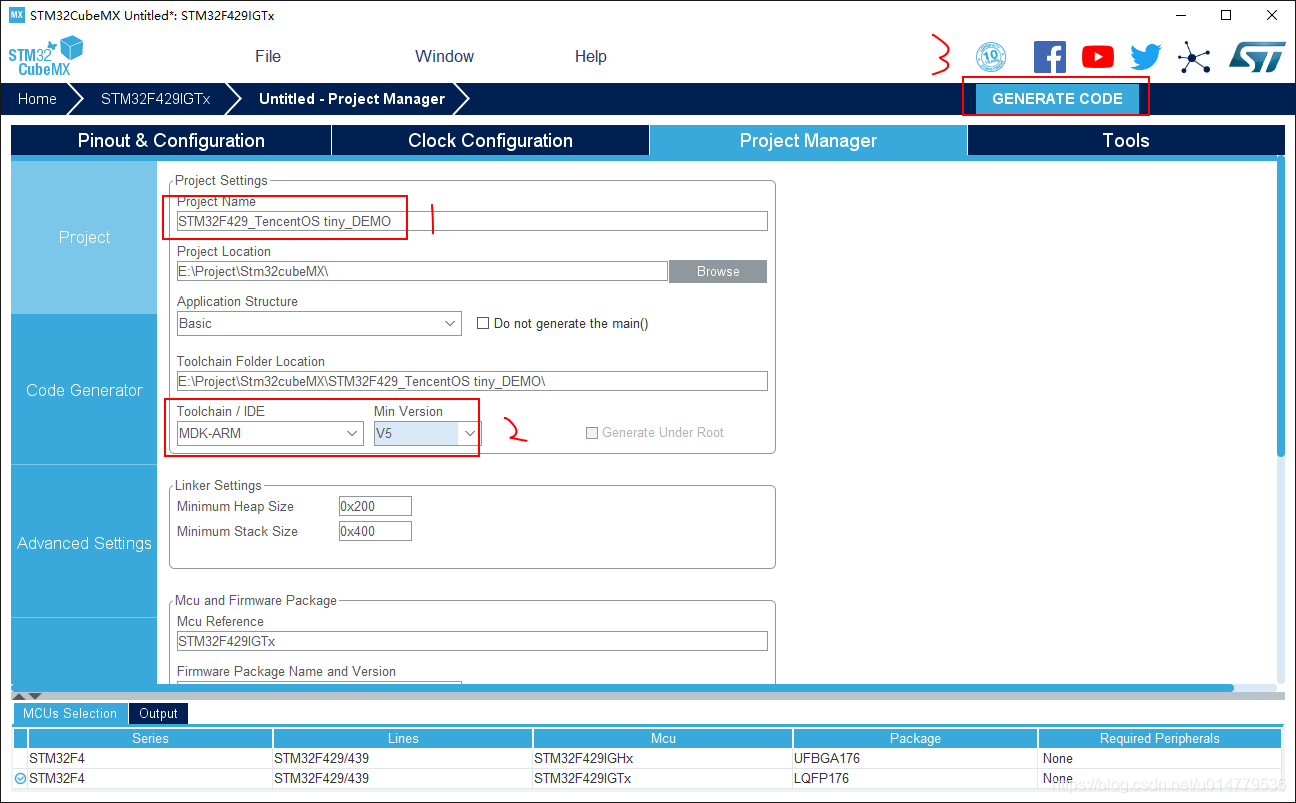
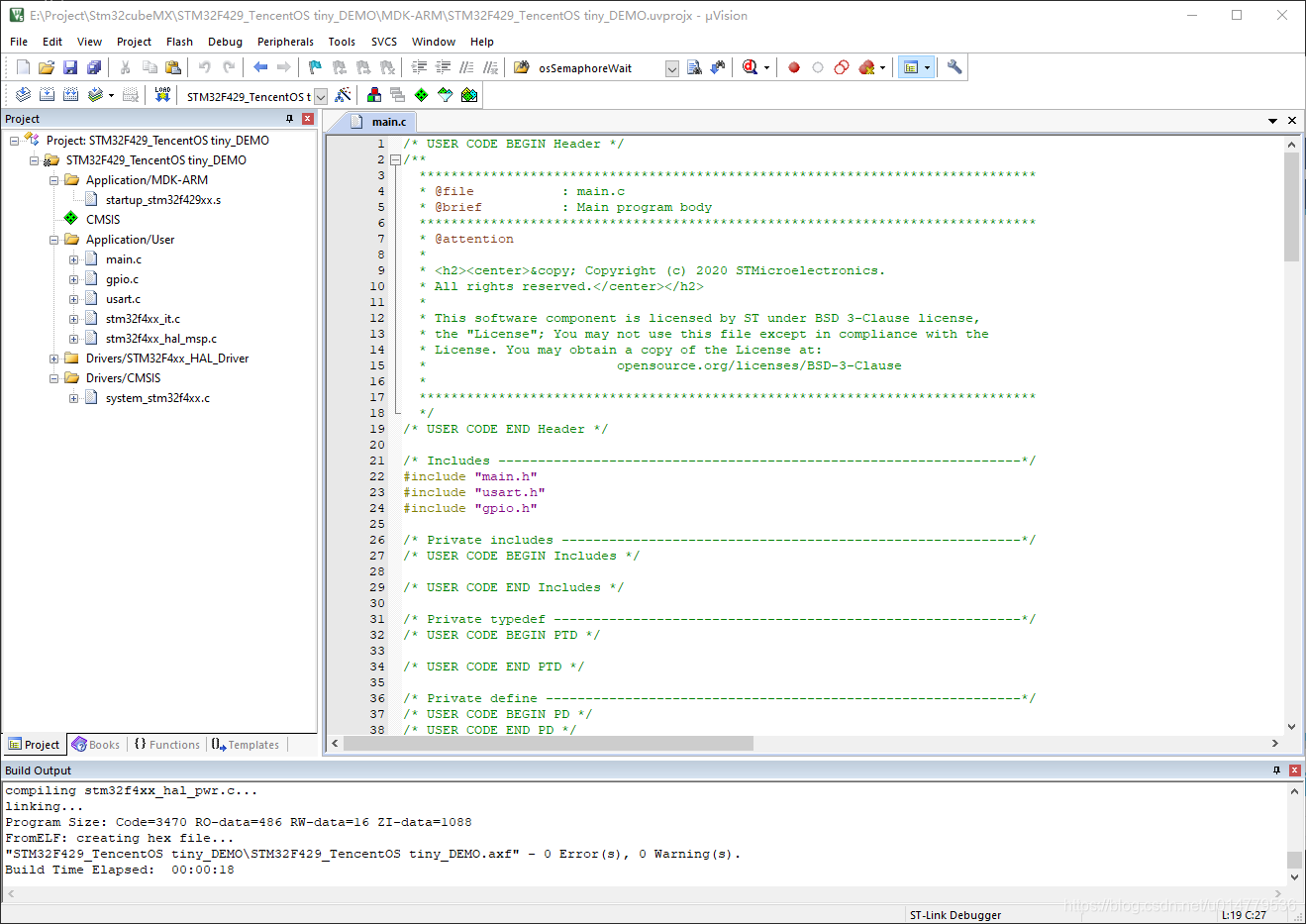
8. 生成工程,编译运行,验证
二、TencentOS tiny文件移植
1. 获取源码
2. 下载到本地,解压如图所示
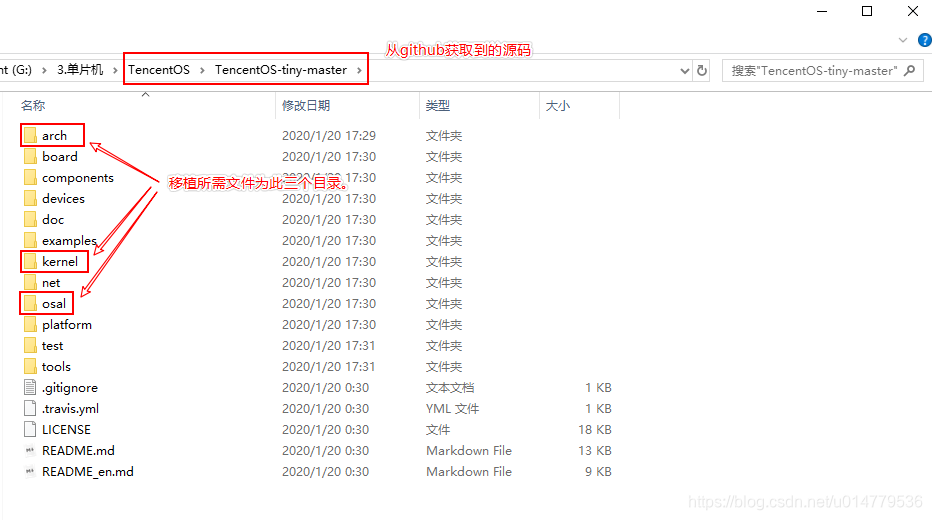
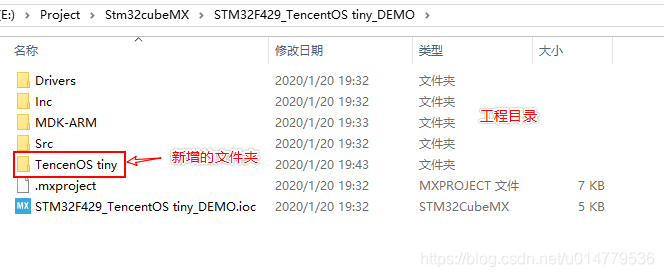
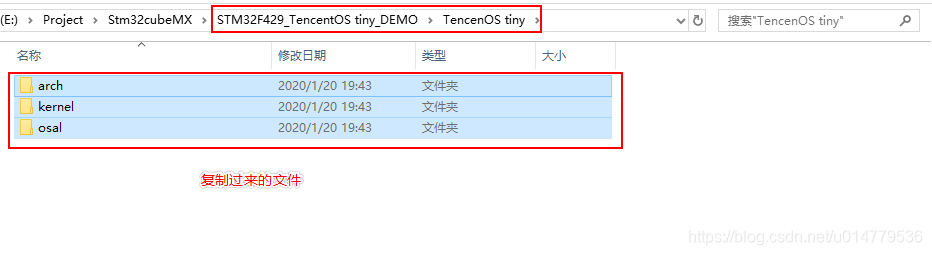
3. 复制源码文件到mdk工程目录
- 打开STM32CubeMX生成的工程目录,添加
TencentOS tiny文件夹,将步骤二的三个文件夹复制到此文件夹
4.新增配置目录及文件
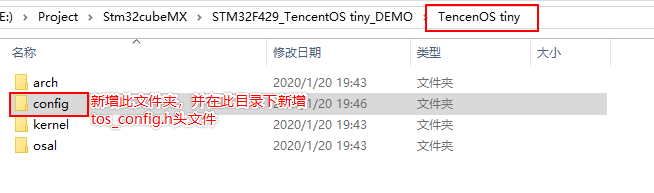
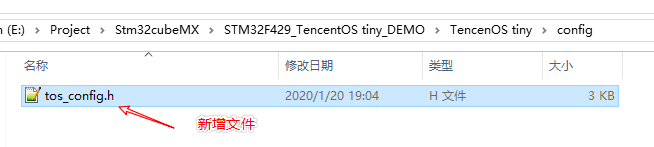
- 其中,头文件内容如下,注意修改引入的头文件名称:
#ifndef _TOS_CONFIG_H_
#define _TOS_CONFIG_H_
#include "stm32f4xx_hal.h" // 目标芯片头文件,用户需要根据情况更改
#define TOS_CFG_TASK_PRIO_MAX 10u // 配置TencentOS tiny默认支持的最大优先级数量
#define TOS_CFG_ROUND_ROBIN_EN 0u // 配置TencentOS tiny的内核是否开启时间片轮转
#define TOS_CFG_OBJECT_VERIFY_EN 1u // 配置TencentOS tiny是否校验指针合法
#define TOS_CFG_TASK_DYNAMIC_CREATE_EN 1u // TencentOS tiny 动态任务创建功能宏
#define TOS_CFG_EVENT_EN 1u // TencentOS tiny 事件模块功能宏
#define TOS_CFG_MMBLK_EN 1u //配置TencentOS tiny是否开启内存块管理模块
#define TOS_CFG_MMHEAP_EN 1u //配置TencentOS tiny是否开启动态内存模块
#define TOS_CFG_MMHEAP_DEFAULT_POOL_EN 1u // TencentOS tiny 默认动态内存池功能宏
#define TOS_CFG_MMHEAP_DEFAULT_POOL_SIZE 0x100 // 配置TencentOS tiny默认动态内存池大小
#define TOS_CFG_MUTEX_EN 1u // 配置TencentOS tiny是否开启互斥锁模块
#define TOS_CFG_MESSAGE_QUEUE_EN 1u // 配置TencentOS tiny是否开启消息队列模块
#define TOS_CFG_MAIL_QUEUE_EN 1u // 配置TencentOS tiny是否开启消息邮箱模块
#define TOS_CFG_PRIORITY_MESSAGE_QUEUE_EN 1u // 配置TencentOS tiny是否开启优先级消息队列模块
#define TOS_CFG_PRIORITY_MAIL_QUEUE_EN 1u // 配置TencentOS tiny是否开启优先级消息邮箱模块
#define TOS_CFG_TIMER_EN 1u // 配置TencentOS tiny是否开启软件定时器模块
#define TOS_CFG_PWR_MGR_EN 0u // 配置TencentOS tiny是否开启外设电源管理模块
#define TOS_CFG_TICKLESS_EN 0u // 配置Tickless 低功耗模块开关
#define TOS_CFG_SEM_EN 1u // 配置TencentOS tiny是否开启信号量模块
#define TOS_CFG_TASK_STACK_DRAUGHT_DEPTH_DETACT_EN 1u // 配置TencentOS tiny是否开启任务栈深度检测
#define TOS_CFG_FAULT_BACKTRACE_EN 0u // 配置TencentOS tiny是否开启异常栈回溯功能
#define TOS_CFG_IDLE_TASK_STK_SIZE 128u // 配置TencentOS tiny空闲任务栈大小
#define TOS_CFG_CPU_TICK_PER_SECOND 1000u // 配置TencentOS tiny的tick频率
#define TOS_CFG_CPU_CLOCK (SystemCoreClock) // 配置TencentOS tiny CPU频率
#define TOS_CFG_TIMER_AS_PROC 1u // 配置是否将TIMER配置成函数模式
#endif
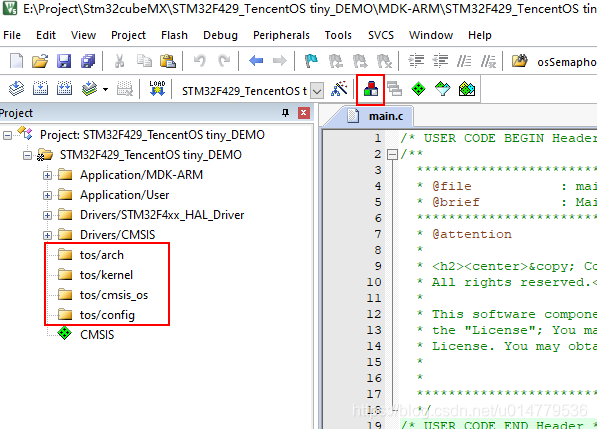
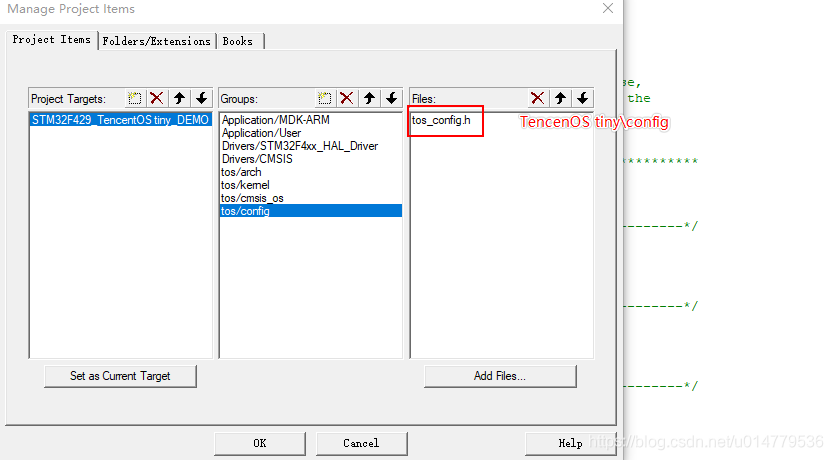
三、MDK工程分组目录及头文件设置
1. 添加分组目录
tos/archtos/kerneltos/cmsis_ostos/config
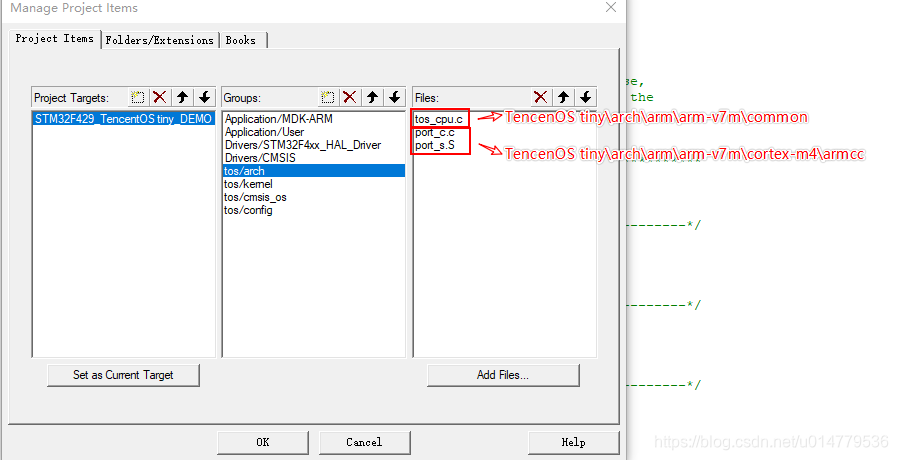
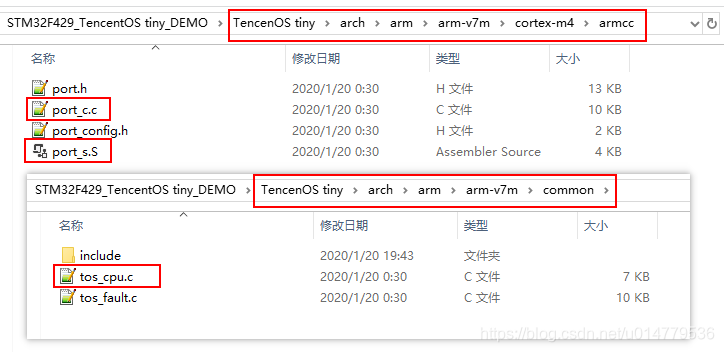
2. 添加tos/arch分组文件
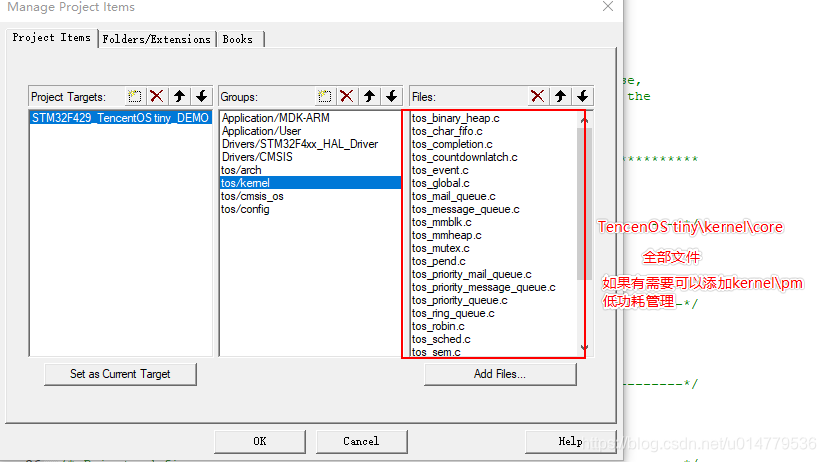
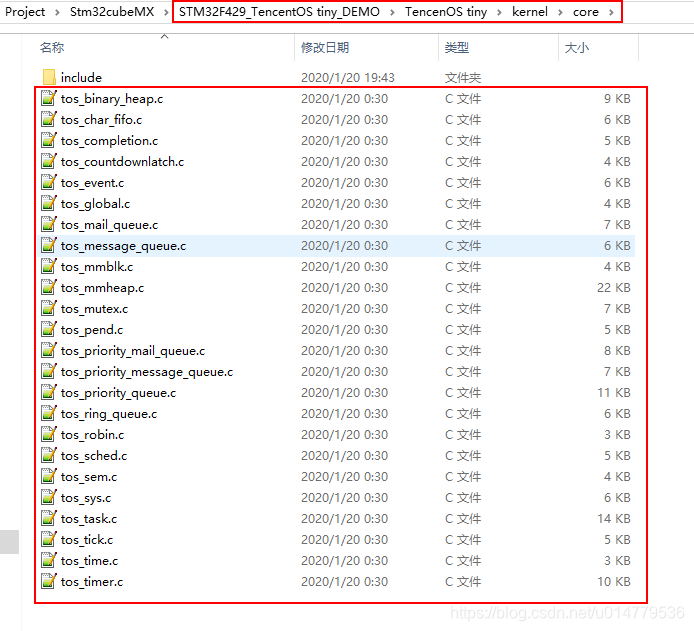
3. 添加tos/kernel分组文件
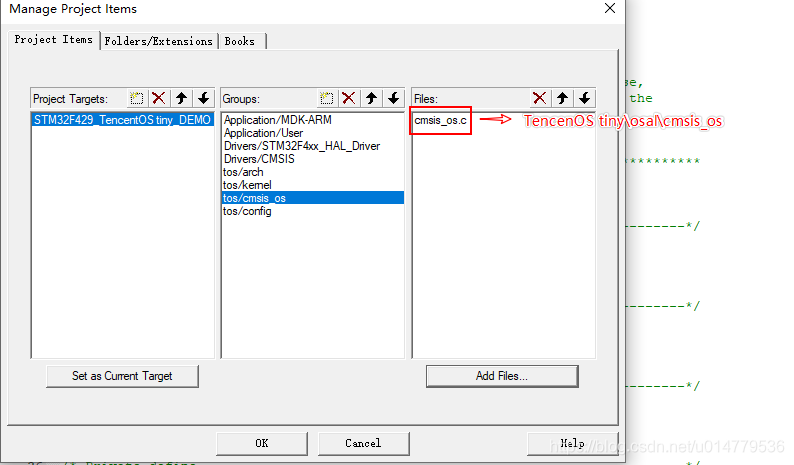
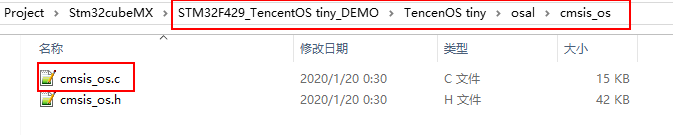
4. 添加tos/cmsis_os分组文件
5. 添加tos/config分组文件

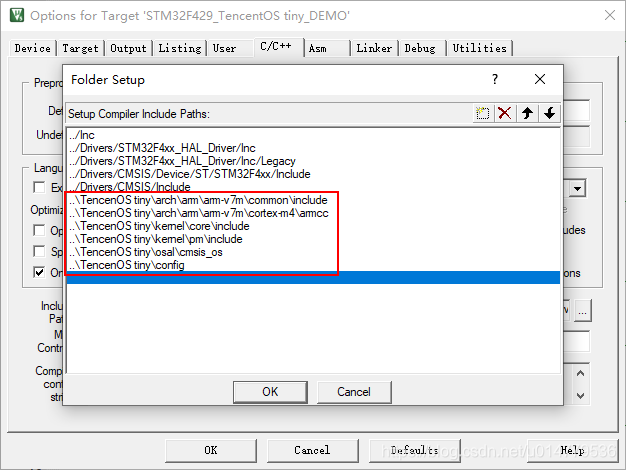
6. 添加头文件路径
- 按下图新增头文件路径
四、MDK源码修改,创建TencentOS tiny任务
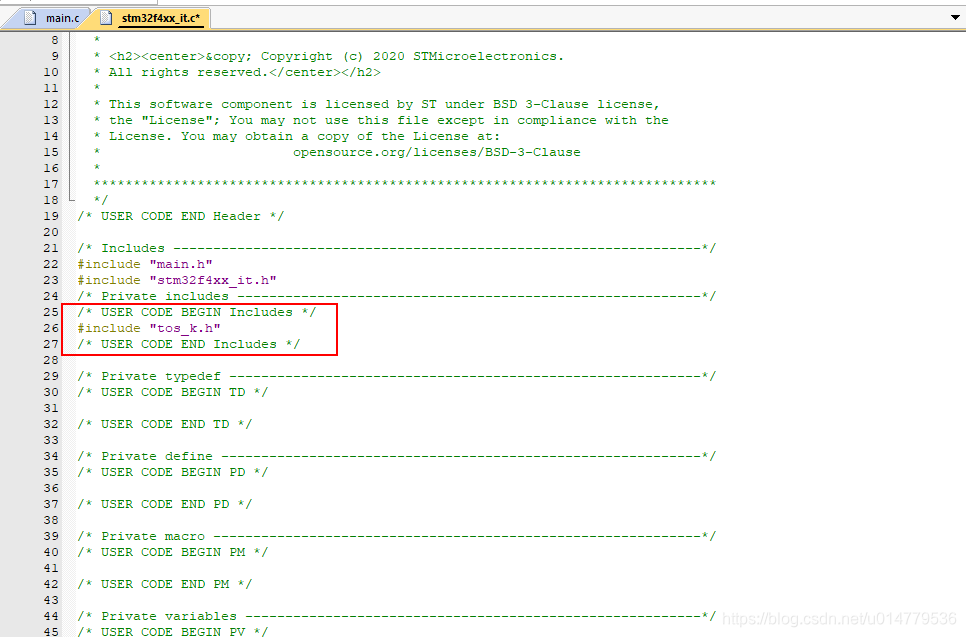
1. 修改stm32f4xx_it.c中断配置文件
- 添加以下代码
/* USER CODE BEGIN Includes */
#include "tos_k.h"
/* USER CODE END Includes */
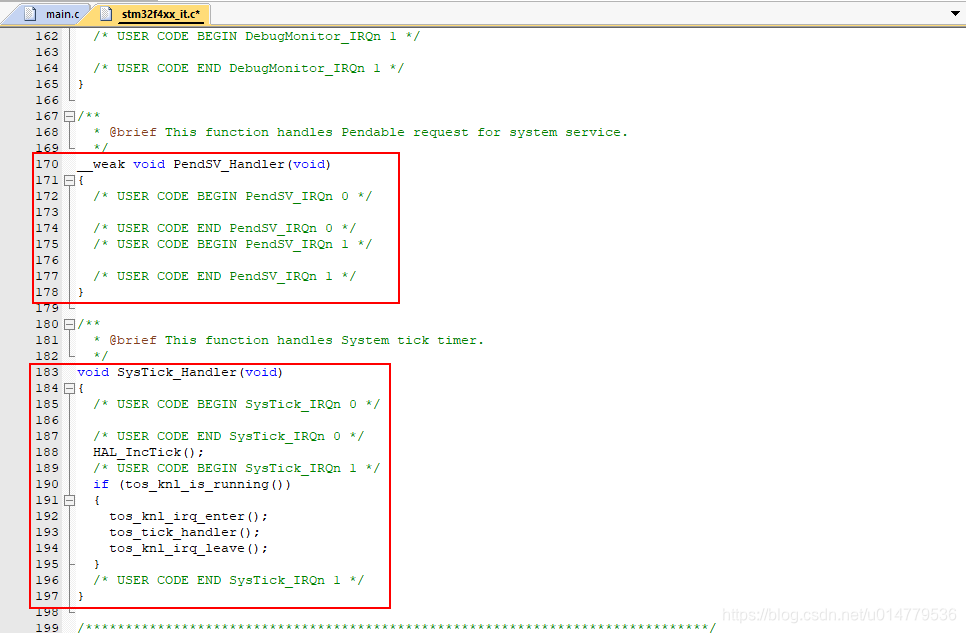
- 修改
PendSV_Handler函数
__weak void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
- 修改
SysTick_Handler函数
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
if (tos_knl_is_running())
{
tos_knl_irq_enter();
tos_tick_handler();
tos_knl_irq_leave();
}
/* USER CODE END SysTick_IRQn 1 */
}
2. 在main.c函数中新建任务
main.c源码如下
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2020 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "cmsis_os.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//task1
#define TASK1_STK_SIZE 256
void task1(void *pdata);
osThreadDef(task1, osPriorityNormal, 1, TASK1_STK_SIZE);
//task2
#define TASK2_STK_SIZE 256
void task2(void *pdata);
osThreadDef(task2, osPriorityNormal, 1, TASK2_STK_SIZE);
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void task1(void *pdata)
{
int count = 1;
while(1)
{
printf("\r\nHello world!\r\n###This is task1 ,count is %d \r\n", count++);
HAL_GPIO_TogglePin(GPIOH,GPIO_PIN_10);
osDelay(500);
}
}
void task2(void *pdata)
{
int count = 1;
while(1)
{
printf("\r\nHello TencentOS !\r\n***This is task2 ,count is %d \r\n", count++);
osDelay(1000);
}
}
int fputc(int ch, FILE *f)
{
if (ch == '\n')
{
HAL_UART_Transmit(&huart1, (void *)"\r", 1,30000);
}
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
osKernelInitialize(); //TOS Tiny kernel initialize
osThreadCreate(osThread(task1), NULL);// Create task1
osThreadCreate(osThread(task2), NULL);// Create task2
osKernelStart();//Start TOS Tiny
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 180;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
3. 观察现象
- task1和task2交替运行
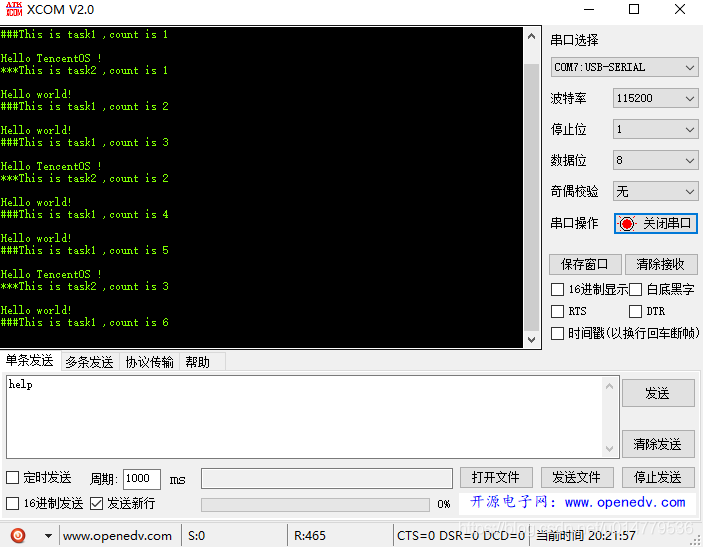
4. 移植成功
来源:CSDN
作者:超级大洋葱806
链接:https://blog.csdn.net/u014779536/article/details/104055561