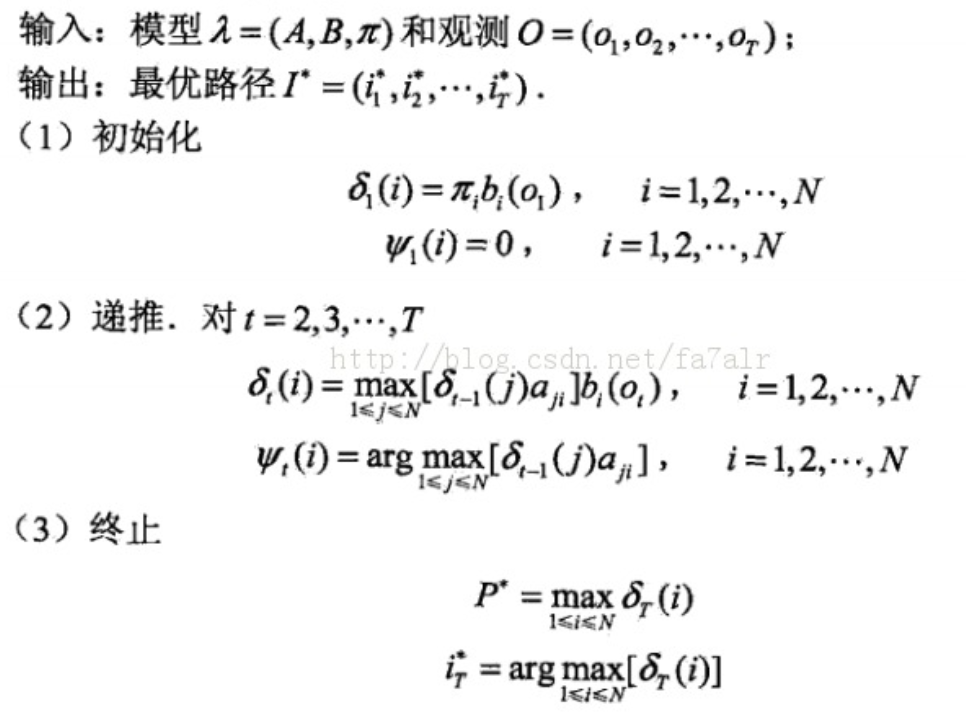
先放一张找到的算法流程图:
上图解释:
A:状态转移概率矩阵,Aij表示状态i到状态j转换的概率,即P(state=j | state=i)。下面代码中以P表示。
B:观测矩阵,Bij表示给定状态i,观测结果为j的概率。即P(observation=j | state=i)
π:初始时状态概率分布,表示各状态出现的概率。代码中以pi表示。
O:输入的观测序列。
![]() :表示经过节点(时刻t,状态state=i)的局部最优路径到此节点时对应的概率,即给定X=(x1,...xt,...xn)子序列(x1,x2,...xt)时,对应的最佳状态序列(末状态state=i)的概率值。
:表示经过节点(时刻t,状态state=i)的局部最优路径到此节点时对应的概率,即给定X=(x1,...xt,...xn)子序列(x1,x2,...xt)时,对应的最佳状态序列(末状态state=i)的概率值。
下面代码中以delta表示
![]() :跟上面相关。表示上面最优路径经过的节点的上一个状态id。下面代码中以w表示。
:跟上面相关。表示上面最优路径经过的节点的上一个状态id。下面代码中以w表示。
1式理解:右边为状态state=i出现的概率乘以(状态i下观测到O[t=1]的概率)
2式理解:当前节点概率值,为(上一时刻各节点概率值乘以状态转换概率)的最大值,再乘以状态state=i时观测到O[t]的概率。这就是动态规划的思想了。
以上,熟悉隐马尔可夫模型的话,理解应该没问题了。
-------------------------------------------------------------------------
下面进入代码部分:
import numpy as np
def my_viterbi(O,P,B,pi):
'''
O:观测序列
P:状态转移矩阵,Pij表示状态i到j转换的条件概率
B:观测矩阵,Bij表示状态i下观测到Oj的条件概率
pi:初始的状态概率分布
return:各个时刻选择的状态id
'''
set_O=list(set(O))
# 观测结果有多少种类
class_observe=len(set_O)
# 将观测序列one-hot化,不然会超过索引
for i in range(len(O)):
O[i]=set_O.index(O[i])
# 进行若干检查
assert np.max(O)<class_observe,'观测序列给出的值超出观测种类维度!'
assert class_observe==B.shape[1],'观测序列与观测矩阵的观测结果维度不一致!'
assert P.shape[0]==B.shape[0],'转移矩阵与观测矩阵的状态维度不一致!'
assert P.shape[0]==len(pi),'转移矩阵与状态分布的状态维度不一致!'
sequence_len=len(O)# 观测序列长度,即有多少个时刻t
states_per_time=P.shape[0]# 每个时刻有多少个状态,这里假设相同。实际可以不同,不同的话,应该要给出每个时刻对应的状态集合。这里默认所有状态
# 记录(局部)最优路径中节点(t时刻状态s)的概率值,当记录完毕后,逆序寻找最优节点即可
delta=np.zeros((sequence_len,states_per_time))
# 记录经过t时刻状态s的局部最优路径的前一个状态id
w=np.zeros((sequence_len,states_per_time))
# 初始化
for s in range(states_per_time):
delta[0,s]=pi[s]*B[s,O[0]]# 即状态概率分布乘以观测矩阵对应元素,得到0时刻各状态对应概率值
for t in range(1,sequence_len):
for s in range(states_per_time):
delta[t,s]=np.max([delta[t-1,s_]*P[s_,s] for s_ in range(states_per_time)])*B[s,O[t]]
w[t,s]=np.argmax([delta[t-1,s_]*P[s_,s] for s_ in range(states_per_time)])
max_sequence_prob=np.max(delta[-1,:])
res=np.zeros(sequence_len).astype(np.int32)
res[-1]=np.argmax(delta[-1,:])
for t in range(sequence_len-2,-1,-1):
res[t]=w[t+1,res[t+1]]
return res,max_sequence_prob
# 状态转移矩阵
P=np.array([[0.5,0.2,0.3],[0.3,0.5,0.2],[0.2,0.3,0.5]])
# 状态生成观测矩阵
B=np.array([[0.5,0.5],[0.4,0.6],[0.7,0.3]])
# 观测序列,假设有2种观察结果,比如扔硬币,从0开始
O=np.array([2,3,3])
# 初始时各个状态出现的概率
pi=np.array([0.2,0.4,0.4])
res,prob=my_viterbi(O, P, B, pi)print(res)
输出:
array([2,1,1])
总结
涉及到的知识点为隐马尔可夫模型和动态规划。比较简单。