1.ov2640和DCMI介绍
OV2640 是 OV(OmniVision)公司生产的一颗 1/4 寸的 CMOS UXGA(1632*1232)图 像传感器。该传感器体积小、工作电压低,提供单片 UXGA 摄像头和影像处理器的所有功 能。通过 SCCB 总线控制,可以输出整帧、子采样、缩放和取窗口等方式的各种分辨率 8/10 位影像数据。该产品 UXGA 图像最高达到 15 帧/秒(SVGA 可达 30 帧,CIF 可达 60 帧)。 用户可以完全控制图像质量、数据格式和传输方式。所有图像处理功能过程包括伽玛曲线、 白平衡、对比度、色度等都可以通过 SCCB 接口编程。OmmiVision 图像传感器应用独有的 传感器技术,通过减少或消除光学或电子缺陷如固定图案噪声、拖尾、浮散等,提高图像质 量,得到清晰的稳定的彩色图像。
DCMI接口是一个同步并行接口,能够 接收外部 8 位、10 位、12 位或 14 位 CMOS 摄像头模块发出的高速数据流。可支持不同 的数据格式:YCbCr4:2:2/RGB565 逐行视频和压缩数据 (JPEG)。 STM32F4 DCM 接口特点: ● 8 位、10 位、12 位或 14 位并行接口 ● 内嵌码/外部行同步和帧同步 ● 连续模式或快照模式 ● 裁剪功能 ● 支持以下数据格式: 1,8/10/12/14 位逐行视频:单色或原始拜尔(Bayer)格式 2,YCbCr 4:2:2 逐行视频 3,RGB 565 逐行视频 4,压缩数据:JPEG DCMI 接口包括如下一些信号: 1, 数据输入(D[0:13]),用于接摄像头的数据输出,接 OV2640 我们只用了 8 位数据。
2, 水平同步(行同步)输入(HSYNC),用于接摄像头的 HSYNC/HREF 信号。 3, 垂直同步(场同步)输入(VSYNC),用于接摄像头的 VSYNC 信号。 4, 像素时钟输入(PIXCLK),用于接摄像头的 PCLK 信号。 DCMI 接口是一个同步并行接口,可接收高速(可达 54 MB/s)数据流。该接口包含多 达 14 条数据线(D13-D0)和一条像素时钟线(PIXCLK)。像素时钟的极性可以编程,因此可以 在像素时钟的上升沿或下降沿捕获数据。 DCMI 接收到的摄像头数据被放到一个 32 位数据寄存器(DCMI_DR)中,然后通过通用 DMA 进行传输。图像缓冲区由 DMA 管理,而不是由摄像头接口管理。 从摄像头接收的数据可以按行/帧来组织(原始 YUV/RGB/拜尔模式),也可以是一系列 JPEG 图像。要使能 JPEG 图像接收,必须将 JPEG 位(DCMI_CR 寄存器的位 3)置 1。
数据流可由可选的 HSYNC(水平同步)信号和 VSYNC(垂直同步)信号硬件同步, 或者通 过数据流中嵌入的同步码同步。
2.Cube配置
(1)打开Cube F429芯片上的DCMI功能,模式和配置如下:

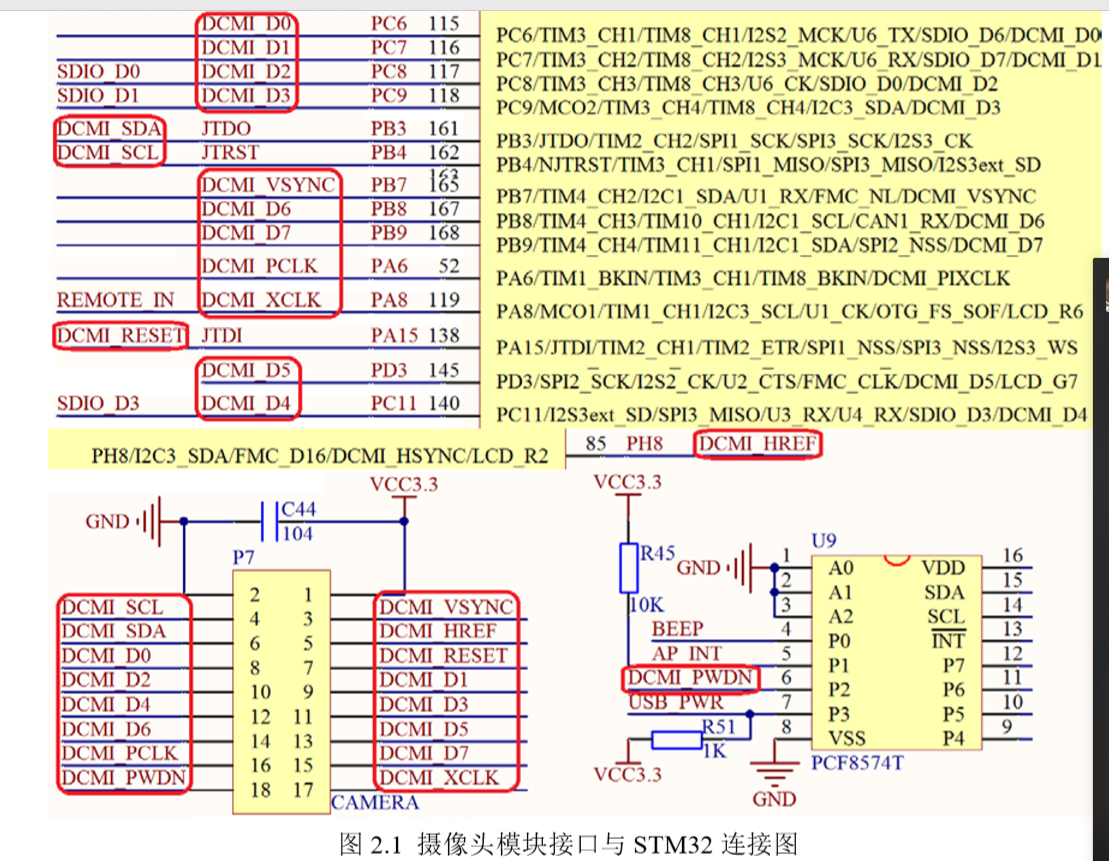
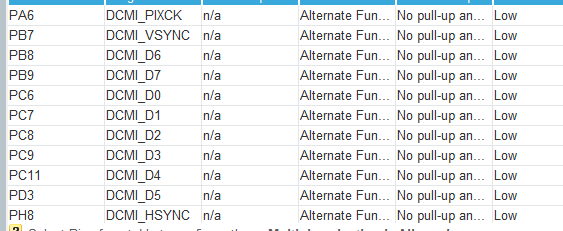
(2)DCMI的复用GPIO口如下,这样就可以直接使用板载的DCMI接口
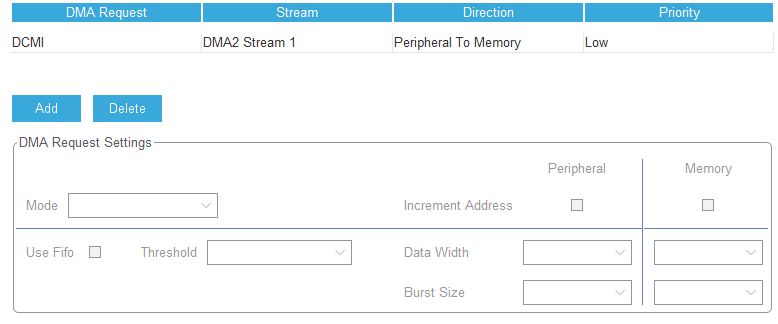
(3)打开DCMI的DMA通道
(4)选择PB3和PB4为SCCB协议的引脚,用来和OV2640通信

3.程序介绍
(1)SCCB协议差不多相当于IIC协议,只是应当信号有点区别
SCCB_HandleTypedef hSCCBx;
////初始化SCCB接口
//void SCCB_Init(void)
//{
// GPIO_InitTypeDef GPIO_Initure;
// __HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB时钟
//
// //PB3.4初始化设置
// GPIO_Initure.Pin=GPIO_PIN_3|GPIO_PIN_4;
// GPIO_Initure.Mode = GPIO_MODE_OUTPUT_PP;
// GPIO_Initure.Pull = GPIO_PULLUP;
// GPIO_Initure.Speed = GPIO_SPEED_FREQ_LOW;
// HAL_GPIO_Init(GPIOB,&GPIO_Initure);
// SCCB_GPIO_MODE_Opt (&hSCCBx);
//}
/*******************************************************************************
* Function Name : vIIC_Handle_Init
* Description : Initialization handle
* Input : iicHandle SCL PORT SCL PIN SDA PORT SDA PIN
* Output : None
* Return : None
****************************************************************************** */
void vSCCB_Handle_Init(void)
{
//引脚 Pin:
hSCCBx.pSCL_Port = SCCB_SCL_GPIO_Port ;
hSCCBx.uSCL_Pin = SCCB_SCL_Pin ;
hSCCBx.pSDA_Port = SCCB_SDA_GPIO_Port ;
hSCCBx.uSDA_Pin = SCCB_SDA_Pin ;
hSCCBx.uWR = NULL ;
switch(SCCB_SDA_Pin)
{
case GPIO_PIN_0 : hSCCBx.uSDA_Mode_Pin_Position = 0 ;break;
case GPIO_PIN_1 : hSCCBx.uSDA_Mode_Pin_Position = 2 ;break;
case GPIO_PIN_2 : hSCCBx.uSDA_Mode_Pin_Position = 4 ;break;
case GPIO_PIN_3 : hSCCBx.uSDA_Mode_Pin_Position = 6 ;break;
case GPIO_PIN_4 : hSCCBx.uSDA_Mode_Pin_Position = 8 ;break;
case GPIO_PIN_5 : hSCCBx.uSDA_Mode_Pin_Position = 10;break;
case GPIO_PIN_6 : hSCCBx.uSDA_Mode_Pin_Position = 12;break;
case GPIO_PIN_7 : hSCCBx.uSDA_Mode_Pin_Position = 14;break;
case GPIO_PIN_8 : hSCCBx.uSDA_Mode_Pin_Position = 16;break;
case GPIO_PIN_9 : hSCCBx.uSDA_Mode_Pin_Position = 18;break;
case GPIO_PIN_10: hSCCBx.uSDA_Mode_Pin_Position = 20;break;
case GPIO_PIN_11: hSCCBx.uSDA_Mode_Pin_Position = 22;break;
case GPIO_PIN_12: hSCCBx.uSDA_Mode_Pin_Position = 24;break;
case GPIO_PIN_13: hSCCBx.uSDA_Mode_Pin_Position = 26;break;
case GPIO_PIN_14: hSCCBx.uSDA_Mode_Pin_Position = 28;break;
case GPIO_PIN_15: hSCCBx.uSDA_Mode_Pin_Position = 30;break;
}
}
//SCCB起始信号
//当时钟为高的时候,数据线的高到低,为SCCB起始信号
//在激活状态下,SDA和SCL均为低电平
void SCCB_Start()
{
SCCB_SDA_1 (&hSCCBx); //拉高数据线
SCCB_SCL_1 (&hSCCBx); //拉高时钟线
delay_us (50); //延时
SCCB_SDA_0 (&hSCCBx); //拉低数据线
delay_us (50); //延时
SCCB_SCL_0 (&hSCCBx); //拉低时钟线
delay_us (50); //延时
}
//SCCB停止信号
//当时钟为高的时候,数据线的低到高,为SCCB停止信号
//空闲状况下,SDA,SCL均为高电平
void SCCB_Stop(void)
{
SCCB_SDA_0 (&hSCCBx); //拉低数据线
delay_us (50); //延时
SCCB_SCL_1 (&hSCCBx); //拉高时钟线
delay_us (50); //延时
SCCB_SDA_1 (&hSCCBx); //拉高数据线
delay_us (50); //延时
}
////产生NA信号
void SCCB_No_Ack(void)
{
SCCB_SDA_1 (&hSCCBx); //SDA拉高 不应答对方
delay_us (50);
SCCB_SCL_1 (&hSCCBx);
delay_us (50);
SCCB_SCL_0 (&hSCCBx);
delay_us (50);
}
////SCCB,写入一个字节
////返回值:0,成功;1,失败.
uint8_t SCCB_WR_Byte(uint8_t dat)
{
uint8_t i,res;
for (i=0; i<8; i++)
{
if(dat & 0X80)
SCCB_SDA_1 (&hSCCBx);
else
SCCB_SDA_0 (&hSCCBx);
dat <<= 1;
delay_us (50);
SCCB_SCL_1 (&hSCCBx);
delay_us (50);
SCCB_SCL_0 (&hSCCBx);
}
SCCB_GPIO_MODE_Ipt (&hSCCBx);
delay_us (50);
SCCB_SCL_1 (&hSCCBx);
delay_us (50);
if(SCCB_SDA_R(&hSCCBx))
res=1;
else
res=0;
SCCB_SCL_0 (&hSCCBx);
SCCB_GPIO_MODE_Opt (&hSCCBx);
return res;
}
//SCCB 读取一个字节
//在SCL的上升沿,数据锁存
//返回值:读到的数据
uint8_t SCCB_RD_Byte(void)
{
uint8_t i,uReceiveByte = 0;
SCCB_GPIO_MODE_Ipt (&hSCCBx);
SCCB_SDA_1 (&hSCCBx);
for(i=0;i<8;i++)
{
uReceiveByte <<= 1;
delay_us (50);
SCCB_SCL_1 (&hSCCBx);
delay_us (50);
if(SCCB_SDA_R (&hSCCBx))
{
uReceiveByte |=0x01;
}
delay_us (50);
SCCB_SCL_0 (&hSCCBx);
delay_us (50);
}
SCCB_GPIO_MODE_Opt (&hSCCBx);
return uReceiveByte;
}
//写寄存器
//返回值:0,成功;1,失败.
uint8_t SCCB_WR_Reg(uint8_t reg,uint8_t data)
{
uint8_t res=0;
SCCB_Start(); //启动SCCB传输
if(SCCB_WR_Byte(SCCB_ID))res=1; //写器件ID
delay_us(100);
if(SCCB_WR_Byte(reg))
res=1; //写寄存器地址
delay_us(100);
if(SCCB_WR_Byte(data))
res=1; //写数据
SCCB_Stop();
return res;
}
//读寄存器
//返回值:读到的寄存器值
uint8_t SCCB_RD_Reg(uint8_t reg)
{
uint8_t val=0;
SCCB_Start(); //启动SCCB传输
SCCB_WR_Byte(SCCB_ID); //写器件ID
delay_us(100);
SCCB_WR_Byte(reg); //写寄存器地址
delay_us(100);
SCCB_Stop();
delay_us(100);
//设置寄存器地址后,才是读
SCCB_Start();
SCCB_WR_Byte(SCCB_ID|0X01); //发送读命令
delay_us(100);
val=SCCB_RD_Byte(); //读取数据
SCCB_No_Ack();
SCCB_Stop();
return val;
}
(2)PCF8574是用来给ov2640上电的
//初始化PCF8574
u8 PCF8574_Init(void)
{
u8 temp=0;
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB时钟
GPIO_Initure.Pin=GPIO_PIN_12; //PB12
GPIO_Initure.Mode=GPIO_MODE_INPUT; //输入
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速
HAL_GPIO_Init(GPIOB,&GPIO_Initure); //初始化
IIC_Init(); //IIC初始化
//检查PCF8574是否在位
IIC_Start();
IIC_Send_Byte(PCF8574_ADDR); //写地址
temp=IIC_Wait_Ack(); //等待应答,通过判断是否有ACK应答,来判断PCF8574的状态
IIC_Stop(); //产生一个停止条件
PCF8574_WriteOneByte(0XFF); //默认情况下所有IO输出高电平
return temp;
}
//读取PCF8574的8位IO值
//返回值:读到的数据
u8 PCF8574_ReadOneByte(void)
{
u8 temp=0;
IIC_Start();
IIC_Send_Byte(PCF8574_ADDR|0X01); //进入接收模式
IIC_Wait_Ack();
temp=IIC_Read_Byte(0);
IIC_Stop(); //产生一个停止条件
return temp;
}
//向PCF8574写入8位IO值
//DataToWrite:要写入的数据
void PCF8574_WriteOneByte(u8 DataToWrite)
{
IIC_Start();
IIC_Send_Byte(PCF8574_ADDR|0X00); //发送器件地址0X40,写数据
IIC_Wait_Ack();
IIC_Send_Byte(DataToWrite); //发送字节
IIC_Wait_Ack();
IIC_Stop(); //产生一个停止条件
delay_ms(10);
}
//设置PCF8574某个IO的高低电平
//bit:要设置的IO编号,0~7
//sta:IO的状态;0或1
void PCF8574_WriteBit(u8 bit,u8 sta)
{
u8 data;
data=PCF8574_ReadOneByte(); //先读出原来的设置
if(sta==0)data&=~(1<<bit);
else data|=1<<bit;
PCF8574_WriteOneByte(data); //写入新的数据
}
//读取PCF8574的某个IO的值
//bit:要读取的IO编号,0~7
//返回值:此IO的值,0或1
u8 PCF8574_ReadBit(u8 bit)
{
u8 data;
data=PCF8574_ReadOneByte(); //先读取这个8位IO的值
if(data&(1<<bit))return 1;
else return 0;
}
(3) ov2640驱动程序(改自原子例程)
//设置摄像头模块PWDN脚的状态
//sta:0,PWDN=0,上电.
// 1,PWDN=1,掉电
void OV2640_PWDN_Set(u8 sta)
{
PCF8574_WriteBit(DCMI_PWDN_IO,sta);
}
//初始化OV2640
//配置完以后,默认输出是1600*1200尺寸的图片!!
//返回值:0,成功
// 其他,错误代码
u8 OV2640_Init(void)
{
u16 i=0;
u16 reg,a;
//设置IO
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟
GPIO_Initure.Pin=GPIO_PIN_15; //PA15
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化
a = PCF8574_Init(); //初始化PCF8574
printf("PCF8574: %d",a);
OV2640_PWDN_Set(0); //POWER ON;
delay_ms(10);
OV2640_RST=0; //复位OV2640
delay_ms(10);
OV2640_RST=1; //结束复位
// SCCB_Init(); //初始化SCCB 的IO口
SCCB_WR_Reg(OV2640_DSP_RA_DLMT, 0x01); //操作sensor寄存器
SCCB_WR_Reg(OV2640_SENSOR_COM7, 0x80); //软复位OV2640
delay_ms(50);
reg=SCCB_RD_Reg(OV2640_SENSOR_MIDH); //读取厂家ID 高八位
reg<<=8;
reg|=SCCB_RD_Reg(OV2640_SENSOR_MIDL); //读取厂家ID 低八位
if(reg!=OV2640_MID)
{
printf("MID:%d\r\n",reg);
return 1;
}
reg=SCCB_RD_Reg(OV2640_SENSOR_PIDH); //读取厂家ID 高八位
reg<<=8;
reg|=SCCB_RD_Reg(OV2640_SENSOR_PIDL); //读取厂家ID 低八位
if(reg!=OV2640_PID)
{
printf("HID:%d\r\n",reg);
return 2;
}
//初始化 OV2640,采用SXGA分辨率(1600*1200)
for(i=0;i<sizeof(ov2640_sxga_init_reg_tbl)/2;i++)
{
SCCB_WR_Reg(ov2640_sxga_init_reg_tbl[i][0],ov2640_sxga_init_reg_tbl[i][1]);
}
return 0x00; //ok
}
//OV2640切换为JPEG模式
void OV2640_JPEG_Mode(void)
{
u16 i=0;
//设置:YUV422格式
for(i=0;i<(sizeof(ov2640_yuv422_reg_tbl)/2);i++)
{
SCCB_WR_Reg(ov2640_yuv422_reg_tbl[i][0],ov2640_yuv422_reg_tbl[i][1]);
}
//设置:输出JPEG数据
for(i=0;i<(sizeof(ov2640_jpeg_reg_tbl)/2);i++)
{
SCCB_WR_Reg(ov2640_jpeg_reg_tbl[i][0],ov2640_jpeg_reg_tbl[i][1]);
}
}
//OV2640切换为RGB565模式
void OV2640_RGB565_Mode(void)
{
u16 i=0;
//设置:RGB565输出
for(i=0;i<(sizeof(ov2640_rgb565_reg_tbl)/2);i++)
{
SCCB_WR_Reg(ov2640_rgb565_reg_tbl[i][0],ov2640_rgb565_reg_tbl[i][1]);
}
}
//自动曝光设置参数表,支持5个等级
const static u8 OV2640_AUTOEXPOSURE_LEVEL[5][8]=
{
{
0xFF,0x01,
0x24,0x20,
0x25,0x18,
0x26,0x60,
},
{
0xFF,0x01,
0x24,0x34,
0x25,0x1c,
0x26,0x00,
},
{
0xFF,0x01,
0x24,0x3e,
0x25,0x38,
0x26,0x81,
},
{
0xFF,0x01,
0x24,0x48,
0x25,0x40,
0x26,0x81,
},
{
0xFF,0x01,
0x24,0x58,
0x25,0x50,
0x26,0x92,
},
};
//OV2640自动曝光等级设置
//level:0~4
void OV2640_Auto_Exposure(u8 level)
{
u8 i;
u8 *p=(u8*)OV2640_AUTOEXPOSURE_LEVEL[level];
for(i=0;i<4;i++)
{
SCCB_WR_Reg(p[i*2],p[i*2+1]);
}
}
//白平衡设置
//0:自动
//1:太阳sunny
//2,阴天cloudy
//3,办公室office
//4,家里home
void OV2640_Light_Mode(u8 mode)
{
u8 regccval=0X5E;//Sunny
u8 regcdval=0X41;
u8 regceval=0X54;
switch(mode)
{
case 0://auto
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XC7,0X10);//AWB ON
return;
case 2://cloudy
regccval=0X65;
regcdval=0X41;
regceval=0X4F;
break;
case 3://office
regccval=0X52;
regcdval=0X41;
regceval=0X66;
break;
case 4://home
regccval=0X42;
regcdval=0X3F;
regceval=0X71;
break;
}
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XC7,0X40); //AWB OFF
SCCB_WR_Reg(0XCC,regccval);
SCCB_WR_Reg(0XCD,regcdval);
SCCB_WR_Reg(0XCE,regceval);
}
//色度设置
//0:-2
//1:-1
//2,0
//3,+1
//4,+2
void OV2640_Color_Saturation(u8 sat)
{
u8 reg7dval=((sat+2)<<4)|0X08;
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0X7C,0X00);
SCCB_WR_Reg(0X7D,0X02);
SCCB_WR_Reg(0X7C,0X03);
SCCB_WR_Reg(0X7D,reg7dval);
SCCB_WR_Reg(0X7D,reg7dval);
}
//亮度设置
//0:(0X00)-2
//1:(0X10)-1
//2,(0X20) 0
//3,(0X30)+1
//4,(0X40)+2
void OV2640_Brightness(u8 bright)
{
SCCB_WR_Reg(0xff, 0x00);
SCCB_WR_Reg(0x7c, 0x00);
SCCB_WR_Reg(0x7d, 0x04);
SCCB_WR_Reg(0x7c, 0x09);
SCCB_WR_Reg(0x7d, bright<<4);
SCCB_WR_Reg(0x7d, 0x00);
}
//对比度设置
//0:-2
//1:-1
//2,0
//3,+1
//4,+2
void OV2640_Contrast(u8 contrast)
{
u8 reg7d0val=0X20;//默认为普通模式
u8 reg7d1val=0X20;
switch(contrast)
{
case 0://-2
reg7d0val=0X18;
reg7d1val=0X34;
break;
case 1://-1
reg7d0val=0X1C;
reg7d1val=0X2A;
break;
case 3://1
reg7d0val=0X24;
reg7d1val=0X16;
break;
case 4://2
reg7d0val=0X28;
reg7d1val=0X0C;
break;
}
SCCB_WR_Reg(0xff,0x00);
SCCB_WR_Reg(0x7c,0x00);
SCCB_WR_Reg(0x7d,0x04);
SCCB_WR_Reg(0x7c,0x07);
SCCB_WR_Reg(0x7d,0x20);
SCCB_WR_Reg(0x7d,reg7d0val);
SCCB_WR_Reg(0x7d,reg7d1val);
SCCB_WR_Reg(0x7d,0x06);
}
//特效设置
//0:普通模式
//1,负片
//2,黑白
//3,偏红色
//4,偏绿色
//5,偏蓝色
//6,复古
void OV2640_Special_Effects(u8 eft)
{
u8 reg7d0val=0X00;//默认为普通模式
u8 reg7d1val=0X80;
u8 reg7d2val=0X80;
switch(eft)
{
case 1://负片
reg7d0val=0X40;
break;
case 2://黑白
reg7d0val=0X18;
break;
case 3://偏红色
reg7d0val=0X18;
reg7d1val=0X40;
reg7d2val=0XC0;
break;
case 4://偏绿色
reg7d0val=0X18;
reg7d1val=0X40;
reg7d2val=0X40;
break;
case 5://偏蓝色
reg7d0val=0X18;
reg7d1val=0XA0;
reg7d2val=0X40;
break;
case 6://复古
reg7d0val=0X18;
reg7d1val=0X40;
reg7d2val=0XA6;
break;
}
SCCB_WR_Reg(0xff,0x00);
SCCB_WR_Reg(0x7c,0x00);
SCCB_WR_Reg(0x7d,reg7d0val);
SCCB_WR_Reg(0x7c,0x05);
SCCB_WR_Reg(0x7d,reg7d1val);
SCCB_WR_Reg(0x7d,reg7d2val);
}
//彩条测试
//sw:0,关闭彩条
// 1,开启彩条(注意OV2640的彩条是叠加在图像上面的)
void OV2640_Color_Bar(u8 sw)
{
u8 reg;
SCCB_WR_Reg(0XFF,0X01);
reg=SCCB_RD_Reg(0X12);
reg&=~(1<<1);
if(sw)reg|=1<<1;
SCCB_WR_Reg(0X12,reg);
}
//设置图像输出窗口
//sx,sy,起始地址
//width,height:宽度(对应:horizontal)和高度(对应:vertical)
void OV2640_Window_Set(u16 sx,u16 sy,u16 width,u16 height)
{
u16 endx;
u16 endy;
u8 temp;
endx=sx+width/2; //V*2
endy=sy+height/2;
SCCB_WR_Reg(0XFF,0X01);
temp=SCCB_RD_Reg(0X03); //读取Vref之前的值
temp&=0XF0;
temp|=((endy&0X03)<<2)|(sy&0X03);
SCCB_WR_Reg(0X03,temp); //设置Vref的start和end的最低2位
SCCB_WR_Reg(0X19,sy>>2); //设置Vref的start高8位
SCCB_WR_Reg(0X1A,endy>>2); //设置Vref的end的高8位
temp=SCCB_RD_Reg(0X32); //读取Href之前的值
temp&=0XC0;
temp|=((endx&0X07)<<3)|(sx&0X07);
SCCB_WR_Reg(0X32,temp); //设置Href的start和end的最低3位
SCCB_WR_Reg(0X17,sx>>3); //设置Href的start高8位
SCCB_WR_Reg(0X18,endx>>3); //设置Href的end的高8位
}
//设置图像输出大小
//OV2640输出图像的大小(分辨率),完全由改函数确定
//width,height:宽度(对应:horizontal)和高度(对应:vertical),width和height必须是4的倍数
//返回值:0,设置成功
// 其他,设置失败
u8 OV2640_OutSize_Set(u16 width,u16 height)
{
u16 outh;
u16 outw;
u8 temp;
if(width%4)return 1;
if(height%4)return 2;
outw=width/4;
outh=height/4;
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XE0,0X04);
SCCB_WR_Reg(0X5A,outw&0XFF); //设置OUTW的低八位
SCCB_WR_Reg(0X5B,outh&0XFF); //设置OUTH的低八位
temp=(outw>>8)&0X03;
temp|=(outh>>6)&0X04;
SCCB_WR_Reg(0X5C,temp); //设置OUTH/OUTW的高位
SCCB_WR_Reg(0XE0,0X00);
return 0;
}
//设置图像开窗大小
//由:OV2640_ImageSize_Set确定传感器输出分辨率从大小.
//该函数则在这个范围上面进行开窗,用于OV2640_OutSize_Set的输出
//注意:本函数的宽度和高度,必须大于等于OV2640_OutSize_Set函数的宽度和高度
// OV2640_OutSize_Set设置的宽度和高度,根据本函数设置的宽度和高度,由DSP
// 自动计算缩放比例,输出给外部设备.
//width,height:宽度(对应:horizontal)和高度(对应:vertical),width和height必须是4的倍数
//返回值:0,设置成功
// 其他,设置失败
u8 OV2640_ImageWin_Set(u16 offx,u16 offy,u16 width,u16 height)
{
u16 hsize;
u16 vsize;
u8 temp;
if(width%4)return 1;
if(height%4)return 2;
hsize=width/4;
vsize=height/4;
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XE0,0X04);
SCCB_WR_Reg(0X51,hsize&0XFF); //设置H_SIZE的低八位
SCCB_WR_Reg(0X52,vsize&0XFF); //设置V_SIZE的低八位
SCCB_WR_Reg(0X53,offx&0XFF); //设置offx的低八位
SCCB_WR_Reg(0X54,offy&0XFF); //设置offy的低八位
temp=(vsize>>1)&0X80;
temp|=(offy>>4)&0X70;
temp|=(hsize>>5)&0X08;
temp|=(offx>>8)&0X07;
SCCB_WR_Reg(0X55,temp); //设置H_SIZE/V_SIZE/OFFX,OFFY的高位
SCCB_WR_Reg(0X57,(hsize>>2)&0X80); //设置H_SIZE/V_SIZE/OFFX,OFFY的高位
SCCB_WR_Reg(0XE0,0X00);
return 0;
}
//该函数设置图像尺寸大小,也就是所选格式的输出分辨率
//UXGA:1600*1200,SVGA:800*600,CIF:352*288
//width,height:图像宽度和图像高度
//返回值:0,设置成功
// 其他,设置失败
u8 OV2640_ImageSize_Set(u16 width,u16 height)
{
u8 temp;
SCCB_WR_Reg(0XFF,0X00);
SCCB_WR_Reg(0XE0,0X04);
SCCB_WR_Reg(0XC0,(width)>>3&0XFF); //设置HSIZE的10:3位
SCCB_WR_Reg(0XC1,(height)>>3&0XFF); //设置VSIZE的10:3位
temp=(width&0X07)<<3;
temp|=height&0X07;
temp|=(width>>4)&0X80;
SCCB_WR_Reg(0X8C,temp);
SCCB_WR_Reg(0XE0,0X00);
return 0;
}
(4)Cube自动生成的DCMI配置,以及手动添加DMA通道配置
DCMI_HandleTypeDef hdcmi;
DMA_HandleTypeDef hdma_dcmi;
/* DCMI init function */
void MX_DCMI_Init(void)
{
hdcmi.Instance = DCMI;
hdcmi.Init.SynchroMode = DCMI_SYNCHRO_HARDWARE;
hdcmi.Init.PCKPolarity = DCMI_PCKPOLARITY_RISING;
hdcmi.Init.VSPolarity = DCMI_VSPOLARITY_LOW;
hdcmi.Init.HSPolarity = DCMI_HSPOLARITY_LOW;
hdcmi.Init.CaptureRate = DCMI_CR_ALL_FRAME;
hdcmi.Init.ExtendedDataMode = DCMI_EXTEND_DATA_8B;
hdcmi.Init.JPEGMode = DCMI_JPEG_DISABLE;
if (HAL_DCMI_Init(&hdcmi) != HAL_OK)
{
Error_Handler();
}
}
void HAL_DCMI_MspInit(DCMI_HandleTypeDef* dcmiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(dcmiHandle->Instance==DCMI)
{
/* USER CODE BEGIN DCMI_MspInit 0 */
/* USER CODE END DCMI_MspInit 0 */
/* DCMI clock enable */
__HAL_RCC_DCMI_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/**DCMI GPIO Configuration
PA6 ------> DCMI_PIXCK
PH8 ------> DCMI_HSYNC
PC6 ------> DCMI_D0
PC7 ------> DCMI_D1
PC8 ------> DCMI_D2
PC9 ------> DCMI_D3
PC11 ------> DCMI_D4
PD3 ------> DCMI_D5
PB7 ------> DCMI_VSYNC
PB8 ------> DCMI_D6
PB9 ------> DCMI_D7
*/
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOH, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9
|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF13_DCMI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* DCMI DMA Init */
/* DCMI Init */
hdma_dcmi.Instance = DMA2_Stream1;
hdma_dcmi.Init.Channel = DMA_CHANNEL_1;
hdma_dcmi.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_dcmi.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_dcmi.Init.MemInc = DMA_MINC_ENABLE;
hdma_dcmi.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma_dcmi.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma_dcmi.Init.Mode = DMA_NORMAL;
hdma_dcmi.Init.Priority = DMA_PRIORITY_LOW;
hdma_dcmi.Init.FIFOMode = DMA_FIFOMODE_ENABLE;
hdma_dcmi.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_FULL;
hdma_dcmi.Init.MemBurst = DMA_MBURST_SINGLE;
hdma_dcmi.Init.PeriphBurst = DMA_PBURST_INC4;
if (HAL_DMA_Init(&hdma_dcmi) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(dcmiHandle,DMA_Handle,hdma_dcmi);
/* USER CODE BEGIN DCMI_MspInit 1 */
printf("DCMI GPIO Init Yes\n");
/* USER CODE END DCMI_MspInit 1 */
}
}
void HAL_DCMI_MspDeInit(DCMI_HandleTypeDef* dcmiHandle)
{
if(dcmiHandle->Instance==DCMI)
{
/* USER CODE BEGIN DCMI_MspDeInit 0 */
/* USER CODE END DCMI_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_DCMI_CLK_DISABLE();
/**DCMI GPIO Configuration
PA6 ------> DCMI_PIXCK
PH8 ------> DCMI_HSYNC
PC6 ------> DCMI_D0
PC7 ------> DCMI_D1
PC8 ------> DCMI_D2
PC9 ------> DCMI_D3
PC11 ------> DCMI_D4
PD3 ------> DCMI_D5
PB7 ------> DCMI_VSYNC
PB8 ------> DCMI_D6
PB9 ------> DCMI_D7
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_6);
HAL_GPIO_DeInit(GPIOH, GPIO_PIN_8);
HAL_GPIO_DeInit(GPIOC, GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9
|GPIO_PIN_11);
HAL_GPIO_DeInit(GPIOD, GPIO_PIN_3);
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_7|GPIO_PIN_8|GPIO_PIN_9);
/* DCMI DMA DeInit */
HAL_DMA_DeInit(dcmiHandle->DMA_Handle);
/* USER CODE BEGIN DCMI_MspDeInit 1 */
/* USER CODE END DCMI_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
//DCMI DMA配置
//mem0addr:存储器地址0 将要存储摄像头数据的内存地址(也可以是外设地址)
//mem1addr:存储器地址1 当只使用mem0addr的时候,该值必须为0
//memblen:存储器位宽,可以为:DMA_MDATAALIGN_BYTE/DMA_MDATAALIGN_HALFWORD/DMA_MDATAALIGN_WORD
//meminc:存储器增长方式,可以为:DMA_MINC_ENABLE/DMA_MINC_DISABLE
void DCMI_DMA_Init(u32 mem0addr,u32 mem1addr,u16 memsize,u32 memblen,u32 meminc)
{
__HAL_RCC_DMA2_CLK_ENABLE(); //使能DMA2时钟
__HAL_LINKDMA(&hdcmi,DMA_Handle,hdma_dcmi); //将DMA与DCMI联系起来
hdma_dcmi.Instance=DMA2_Stream1; //DMA2数据流1
hdma_dcmi.Init.Channel=DMA_CHANNEL_1; //通道1
hdma_dcmi.Init.Direction=DMA_PERIPH_TO_MEMORY; //外设到存储器
hdma_dcmi.Init.PeriphInc=DMA_PINC_DISABLE; //外设非增量模式
hdma_dcmi.Init.MemInc=meminc; //存储器增量模式
hdma_dcmi.Init.PeriphDataAlignment=DMA_PDATAALIGN_WORD; //外设数据长度:32位
hdma_dcmi.Init.MemDataAlignment=memblen; //存储器数据长度:8/16/32位
hdma_dcmi.Init.Mode=DMA_CIRCULAR; //使用循环模式
hdma_dcmi.Init.Priority=DMA_PRIORITY_HIGH; //高优先级
hdma_dcmi.Init.FIFOMode=DMA_FIFOMODE_ENABLE; //使能FIFO
hdma_dcmi.Init.FIFOThreshold=DMA_FIFO_THRESHOLD_HALFFULL; //使用1/2的FIFO
hdma_dcmi.Init.MemBurst=DMA_MBURST_SINGLE; //存储器突发传输
hdma_dcmi.Init.PeriphBurst=DMA_PBURST_SINGLE; //外设突发单次传输
HAL_DMA_DeInit(&hdma_dcmi); //先清除以前的设置
HAL_DMA_Init(&hdma_dcmi); //初始化DMA
//在开启DMA之前先使用__HAL_UNLOCK()解锁一次DMA,因为HAL_DMA_Statrt()HAL_DMAEx_MultiBufferStart()
//这两个函数一开始要先使用__HAL_LOCK()锁定DMA,而函数__HAL_LOCK()会判断当前的DMA状态是否为锁定状态,如果是
//锁定状态的话就直接返回HAL_BUSY,这样会导致函数HAL_DMA_Statrt()和HAL_DMAEx_MultiBufferStart()后续的DMA配置
//程序直接被跳过!DMA也就不能正常工作,为了避免这种现象,所以在启动DMA之前先调用__HAL_UNLOC()先解锁一次DMA。
if (HAL_DMA_Init(&hdma_dcmi) != HAL_OK)
{
Error_Handler();
}
__HAL_LINKDMA(&hdcmi,DMA_Handle,hdma_dcmi);
__HAL_UNLOCK(&hdma_dcmi);
HAL_DMA_Start(&hdma_dcmi,(u32)&DCMI->DR,mem0addr,memsize);
}
//DCMI,启动传输
void DCMI_Start(void)
{
LCD_SetCursor(0,0);
LCD_WriteRAM_Prepare(); //开始写入GRAM
__HAL_DMA_ENABLE(&hdma_dcmi); //使能DMA
DCMI->CR|=DCMI_CR_CAPTURE; //DCMI捕获使能
printf("DCMI_Start OK\n");
}
//DCMI,关闭传输
void DCMI_Stop(void)
{
DCMI->CR&=~(DCMI_CR_CAPTURE); //关闭捕获
while(DCMI->CR&0X01); //等待传输完成
__HAL_DMA_DISABLE(&hdma_dcmi); //关闭DMA
}
/* USER CODE END 1 */
4.程序检测
该例程是用开发板自带的MCU屏显示摄像头拍摄的影像,初始化的时候记得加上下面两个函数,要不然会无图像显示
HAL_DCMI_Start_DMA(&hdcmi,DCMI_MODE_CONTINUOUS,(u32)&LCD->LCD_RAM,1); //DCMI启动DMA通道
HAL_DMA_Start(&hdma_dcmi,(u32)&DCMI->DR,(u32)&LCD->LCD_RAM,1);int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t x=0;
uint16_t outputheight=0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
// Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_DCMI_Init();
// MX_FMC_Init();
/* USER CODE BEGIN 2 */
delay_init(180); //初始化延时函数
LCD_Init(); //初始化LCD
vSCCB_Handle_Init();
PCF8574_Init();
while(OV2640_Init())
{
printf("ov2640 no\n");
}
printf("ov2640 Yse\n");
OV2640_RGB565_Mode(); //RGB565模式
OV2640_Light_Mode(1); //自动模式
OV2640_Color_Saturation(3);//色彩饱和度0
OV2640_Brightness(4); //亮度0
OV2640_Contrast(3); //对比度0
MX_DCMI_Init();
DCMI_DMA_Init((u32)&LCD->LCD_RAM,0,1,DMA_MDATAALIGN_HALFWORD,DMA_MINC_DISABLE); //DCMI DMA配置,MCU屏,竖屏
yoffset=0;
outputheight=lcddev.height;
curline=yoffset; //行数复位
OV2640_OutSize_Set(lcddev.width,outputheight); //满屏缩放显示
LCD_Clear(BLACK);
DCMI_Start(); //启动传输
HAL_DCMI_Start_DMA(&hdcmi,DCMI_MODE_CONTINUOUS,(u32)&LCD->LCD_RAM,1); //DCMI启动DMA通道
HAL_DMA_Start(&hdma_dcmi,(u32)&DCMI->DR,(u32)&LCD->LCD_RAM,1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
原文出处:https://www.cnblogs.com/feiniaoliangtiangao/p/11407787.html
来源:oschina
链接:https://my.oschina.net/u/4277474/blog/3255174