通过分析OpenCV.JS
(官方下载地址 https://docs.opencv.org/_VERSION_/opencv.js)的白名单,我们可以了解目前官方PreBuild版本并没有实现QR识别。

# Classes and methods whitelist
core = { '' : [ 'absdiff', 'add', 'addWeighted', 'bitwise_and', 'bitwise_not', 'bitwise_or', 'bitwise_xor', 'cartToPolar',\
'compare', 'convertScaleAbs', 'copyMakeBorder', 'countNonZero', 'determinant', 'dft', 'divide', 'eigen', \
'exp', 'flip', 'getOptimalDFTSize', 'gemm', 'hconcat', 'inRange', 'invert', 'kmeans', 'log', 'magnitude', \
'max', 'mean', 'meanStdDev', 'merge', 'min', 'minMaxLoc', 'mixChannels', 'multiply', 'norm', 'normalize', \
'perspectiveTransform', 'polarToCart', 'pow', 'randn', 'randu', 'reduce', 'repeat', 'rotate', 'setIdentity', 'setRNGSeed', \
'solve', 'solvePoly', 'split', 'sqrt', 'subtract', 'trace', 'transform', 'transpose', 'vconcat'],
'Algorithm' : []}
imgproc = { '' : [ 'Canny', 'GaussianBlur', 'Laplacian', 'HoughLines', 'HoughLinesP', 'HoughCircles', 'Scharr', 'Sobel', \
'adaptiveThreshold', 'approxPolyDP', 'arcLength', 'bilateralFilter', 'blur', 'boundingRect', 'boxFilter',\
'calcBackProject', 'calcHist', 'circle', 'compareHist', 'connectedComponents', 'connectedComponentsWithStats', \
'contourArea', 'convexHull', 'convexityDefects', 'cornerHarris', 'cornerMinEigenVal', 'createCLAHE', \
'createLineSegmentDetector', 'cvtColor', 'demosaicing', 'dilate', 'distanceTransform', 'distanceTransformWithLabels', \
'drawContours', 'ellipse', 'ellipse2Poly', 'equalizeHist', 'erode', 'filter2D', 'findContours', 'fitEllipse', \
'fitLine', 'floodFill', 'getAffineTransform', 'getPerspectiveTransform', 'getRotationMatrix2D', 'getStructuringElement', \
'goodFeaturesToTrack', 'grabCut', 'initUndistortRectifyMap', 'integral', 'integral2', 'isContourConvex', 'line', \
'matchShapes', 'matchTemplate', 'medianBlur', 'minAreaRect', 'minEnclosingCircle', 'moments', 'morphologyEx', \
'pointPolygonTest', 'putText', 'pyrDown', 'pyrUp', 'rectangle', 'remap', 'resize', 'sepFilter2D', 'threshold', \
'undistort', 'warpAffine', 'warpPerspective', 'warpPolar', 'watershed', \
'fillPoly', 'fillConvexPoly'],
'CLAHE' : [ 'apply', 'collectGarbage', 'getClipLimit', 'getTilesGridSize', 'setClipLimit', 'setTilesGridSize']}
objdetect = { '' : [ 'groupRectangles'],
'HOGDescriptor' : [ 'load', 'HOGDescriptor', 'getDefaultPeopleDetector', 'getDaimlerPeopleDetector', 'setSVMDetector', 'detectMultiScale'],
'CascadeClassifier' : [ 'load', 'detectMultiScale2', 'CascadeClassifier', 'detectMultiScale3', 'empty', 'detectMultiScale']}
video = { '' : [ 'CamShift', 'calcOpticalFlowFarneback', 'calcOpticalFlowPyrLK', 'createBackgroundSubtractorMOG2', \
'findTransformECC', 'meanShift'],
'BackgroundSubtractorMOG2' : [ 'BackgroundSubtractorMOG2', 'apply'],
'BackgroundSubtractor' : [ 'apply', 'getBackgroundImage']}
dnn = { 'dnn_Net' : [ 'setInput', 'forward'],
'' : [ 'readNetFromCaffe', 'readNetFromTensorflow', 'readNetFromTorch', 'readNetFromDarknet',
'readNetFromONNX', 'readNet', 'blobFromImage']}
features2d = { 'Feature2D' : [ 'detect', 'compute', 'detectAndCompute', 'descriptorSize', 'descriptorType', 'defaultNorm', 'empty', 'getDefaultName'],
'BRISK' : [ 'create', 'getDefaultName'],
'ORB' : [ 'create', 'setMaxFeatures', 'setScaleFactor', 'setNLevels', 'setEdgeThreshold', 'setFirstLevel', 'setWTA_K', 'setScoreType', 'setPatchSize', 'getFastThreshold', 'getDefaultName'],
'MSER' : [ 'create', 'detectRegions', 'setDelta', 'getDelta', 'setMinArea', 'getMinArea', 'setMaxArea', 'getMaxArea', 'setPass2Only', 'getPass2Only', 'getDefaultName'],
'FastFeatureDetector' : [ 'create', 'setThreshold', 'getThreshold', 'setNonmaxSuppression', 'getNonmaxSuppression', 'setType', 'getType', 'getDefaultName'],
'AgastFeatureDetector' : [ 'create', 'setThreshold', 'getThreshold', 'setNonmaxSuppression', 'getNonmaxSuppression', 'setType', 'getType', 'getDefaultName'],
'GFTTDetector' : [ 'create', 'setMaxFeatures', 'getMaxFeatures', 'setQualityLevel', 'getQualityLevel', 'setMinDistance', 'getMinDistance', 'setBlockSize', 'getBlockSize', 'setHarrisDetector', 'getHarrisDetector', 'setK', 'getK', 'getDefaultName'],
# 'SimpleBlobDetector': ['create'],
'KAZE' : [ 'create', 'setExtended', 'getExtended', 'setUpright', 'getUpright', 'setThreshold', 'getThreshold', 'setNOctaves', 'getNOctaves', 'setNOctaveLayers', 'getNOctaveLayers', 'setDiffusivity', 'getDiffusivity', 'getDefaultName'],
'AKAZE' : [ 'create', 'setDescriptorType', 'getDescriptorType', 'setDescriptorSize', 'getDescriptorSize', 'setDescriptorChannels', 'getDescriptorChannels', 'setThreshold', 'getThreshold', 'setNOctaves', 'getNOctaves', 'setNOctaveLayers', 'getNOctaveLayers', 'setDiffusivity', 'getDiffusivity', 'getDefaultName'],
'DescriptorMatcher' : [ 'add', 'clear', 'empty', 'isMaskSupported', 'train', 'match', 'knnMatch', 'radiusMatch', 'clone', 'create'],
'BFMatcher' : [ 'isMaskSupported', 'create'],
'' : [ 'drawKeypoints', 'drawMatches', 'drawMatchesKnn']}
photo = { '' : [ 'createAlignMTB', 'createCalibrateDebevec', 'createCalibrateRobertson', \
'createMergeDebevec', 'createMergeMertens', 'createMergeRobertson', \
'createTonemapDrago', 'createTonemapMantiuk', 'createTonemapReinhard', 'inpaint'],
'CalibrateCRF' : [ 'process'],
'AlignMTB' : [ 'calculateShift', 'shiftMat', 'computeBitmaps', 'getMaxBits', 'setMaxBits', \
'getExcludeRange', 'setExcludeRange', 'getCut', 'setCut'],
'CalibrateDebevec' : [ 'getLambda', 'setLambda', 'getSamples', 'setSamples', 'getRandom', 'setRandom'],
'CalibrateRobertson' : [ 'getMaxIter', 'setMaxIter', 'getThreshold', 'setThreshold', 'getRadiance'],
'MergeExposures' : [ 'process'],
'MergeDebevec' : [ 'process'],
'MergeMertens' : [ 'process', 'getContrastWeight', 'setContrastWeight', 'getSaturationWeight', \
'setSaturationWeight', 'getExposureWeight', 'setExposureWeight'],
'MergeRobertson' : [ 'process'],
'Tonemap' : [ 'process' , 'getGamma', 'setGamma'],
'TonemapDrago' : [ 'getSaturation', 'setSaturation', 'getBias', 'setBias', \
'getSigmaColor', 'setSigmaColor', 'getSigmaSpace', 'setSigmaSpace'],
'TonemapMantiuk' : [ 'getScale', 'setScale', 'getSaturation', 'setSaturation'],
'TonemapReinhard' : [ 'getIntensity', 'setIntensity', 'getLightAdaptation', 'setLightAdaptation', \
'getColorAdaptation', 'setColorAdaptation']
}
aruco = { '' : [ 'detectMarkers', 'drawDetectedMarkers', 'drawAxis', 'estimatePoseSingleMarkers', 'estimatePoseBoard', 'estimatePoseCharucoBoard', 'interpolateCornersCharuco', 'drawDetectedCornersCharuco'],
'aruco_Dictionary' : [ 'get', 'drawMarker'],
'aruco_Board' : [ 'create'],
'aruco_GridBoard' : [ 'create', 'draw'],
'aruco_CharucoBoard' : [ 'create', 'draw'],
}
calib3d = { '' : [ 'findHomography', 'calibrateCameraExtended', 'drawFrameAxes', 'estimateAffine2D', 'getDefaultNewCameraMatrix', 'initUndistortRectifyMap', 'Rodrigues']}
white_list = makeWhiteList([core, imgproc, objdetect, video, dnn, features2d, photo, aruco, calib3d])
但是我们仍然可以通过轮廓分析的相关方法,去实现“基于opencv.js实现二维码定位”,这就是本篇BLOG的主要内容。
一、基本原理
主要内容请参考《OpenCV使用FindContours进行二维码定位》,这里重要的回顾一下。
使
用过FindContours直接寻找联通区域的函数。
典型的运用在二维码上面:

对于它的3个定位点
,这种重复包含的特性,在图上只有
不容易重复的
三处,这是具有排它性的。
 ,这种重复包含的特性,在图上只有
不容易重复的
三处,这是具有排它性的。
,这种重复包含的特性,在图上只有
不容易重复的
三处,这是具有排它性的。
那么轮廓识别的结果是如何展示的了?比如
在这幅图中(白色区域为有数据的区域,黑色为无数据),0,1,2是第一层,然后里面是3,3的里面是4和5。(2a表示是2的内部),他们的关系应该是这样的:
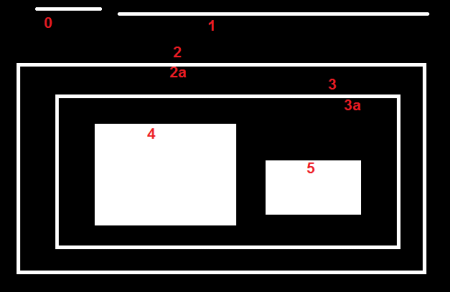

所以我们只需要寻找某一个轮廓“有无爷爷轮廓”,就可以判断出来它是否“重复包含”
值得参考的C++代码应该是这样的,其中注释部分已经说明的比较清楚。
#
include
"opencv2/highgui/highgui.hpp"
#
include
"opencv2/imgproc/imgproc.hpp"
#
include
<
iostream
>
#
include
<
stdio.h
>
#
include
<
stdlib.h
>
#
include
<
math.h
>
using
namespace
cv;
using
namespace
std;
//找到所提取轮廓的中心点
//在提取的中心小正方形的边界上每隔周长个像素提取一个点的坐标,求所提取四个点的平均坐标(即为小正方形的大致中心)
Point Center_cal(vector
<
vector
<
Point
>
>
contours,
int
i)
{
int
centerx
=
0
,centery
=
0
,n
=
contours[i].size();
centerx
=
(contours[i][n
/
4
].x
+
contours[i][n
*
2
/
4
].x
+
contours[i][
3
*
n
/
4
].x
+
contours[i][n
-
1
].x)
/
4
;
centery
=
(contours[i][n
/
4
].y
+
contours[i][n
*
2
/
4
].y
+
contours[i][
3
*
n
/
4
].y
+
contours[i][n
-
1
].y)
/
4
;
Point point1
=
Point(centerx,centery);
return
point1;
}
int
main(
int
argc,
char
*
*
argv[] )
{
Mat src
=
imread(
"e:/sandbox/qrcode.jpg"
,
1
);
resize(src,src,Size(
800
,
600
));
//标准大小
Mat src_gray;
Mat src_all
=
src.clone();
Mat threshold_output;
vector
<
vector
<
Point
>
>
contours,contours2;
vector
<
Vec4i
>
hierarchy;
//预处理
cvtColor( src, src_gray, CV_BGR2GRAY );
blur( src_gray, src_gray, Size(
3
,
3
) );
//模糊,去除毛刺
threshold( src_gray, threshold_output,
100
,
255
, THRESH_OTSU );
//寻找轮廓
//第一个参数是输入图像 2值化的
//第二个参数是内存存储器,FindContours找到的轮廓放到内存里面。
//第三个参数是层级,**[Next, Previous, First_Child, Parent]** 的vector
//第四个参数是类型,采用树结构
//第五个参数是节点拟合模式,这里是全部寻找
findContours( threshold_output, contours, hierarchy, CV_RETR_TREE, CHAIN_APPROX_NONE, Point(
0
,
0
) );
//轮廓筛选
int
c
=
0
,ic
=
0
,area
=
0
;
int
parentIdx
=
-
1
;
for
(
int
i
=
0
; i
<
contours.size(); i
++
)
{
//hierarchy[i][2] != -1 表示不是最外面的轮廓
if
(hierarchy[i][
2
]
!=
-
1
&&
ic
==
0
)
{
parentIdx
=
i;
ic
++
;
}
else
if
(hierarchy[i][
2
]
!=
-
1
)
{
ic
++
;
}
//最外面的清0
else
if
(hierarchy[i][
2
]
==
-
1
)
{
ic
=
0
;
parentIdx
=
-
1
;
}
//找到定位点信息
if
( ic
>
=
2
)
{
contours2.push_back(contours[parentIdx]);
ic
=
0
;
parentIdx
=
-
1
;
}
}
//填充定位点
for
(
int
i
=
0
; i
<
contours2.size(); i
++
)
drawContours( src_all, contours2, i, CV_RGB(
0
,
255
,
0
) ,
-
1
);
//连接定位点
Point point[
3
];
for
(
int
i
=
0
; i
<
contours2.size(); i
++
)
{
point[i]
=
Center_cal( contours2, i );
}
line(src_all,point[
0
],point[
1
],Scalar(
0
,
0
,
255
),
2
);
line(src_all,point[
1
],point[
2
],Scalar(
0
,
0
,
255
),
2
);
line(src_all,point[
0
],point[
2
],Scalar(
0
,
0
,
255
),
2
);
imshow(
"结果"
, src_all );
waitKey(
0
);
return
(
0
);
}
二、算法重点
由于
hierarchy
这块是比较缺乏文档的,在转换为JS的过程中存在一定困难,最终得到了以下的正确结果:
<!
DOCTYPE
html
>
<
html
>
<
head
>
<
meta
charset=
"utf-8"
>
<
title
>Hello OpenCV.js
</
title
>
<
script
async
src=
"opencv.js"
onload=
"
onOpenCvReady();
"
type=
"text/javascript"
></
script
>
</
head
>
<
body
>
<
h2
>Hello OpenCV.js
</
h2
>
<
p
id=
"status"
>OpenCV.js is loading...
</
p
>
<
div
>
<
div
class=
"inputoutput"
>
<
img
id=
"imageSrc"
alt=
"No Image"
/>
<
div
class=
"caption"
>imageSrc
<
input
type=
"file"
id=
"fileInput"
name=
"file"
/></
div
>
</
div
>
<
div
class=
"inputoutput"
>
<
canvas
id=
"canvasOutput"
></
canvas
>
<
div
class=
"caption"
>canvasOutput
</
div
>
</
div
>
<
div
class=
"inputoutput2"
>
<
canvas
id=
"canvasOutput2"
></
canvas
>
<
div
class=
"caption"
>canvasOutput2
</
div
>
</
div
>
</
div
>
<
script
type=
"text/javascript"
>
let imgElement = document.getElementById(
'imageSrc');
let inputElement = document.getElementById(
'fileInput');
inputElement.addEventListener(
'change', (e)
=> {
imgElement.src = URL.createObjectURL(e.target.files[
0]);
},
false);
imgElement.onload =
function() {
let src = cv.imread(imgElement);
let src_clone = cv.imread(imgElement);
let dsize =
new cv.Size(
800,
600);
// You can try more different parameters
cv.resize(src, src, dsize);cv.resize(src_clone, src_clone, dsize);
let dst = cv.Mat.zeros(src.rows,src.cols, cv.CV_8UC3);
cv.cvtColor(src, src, cv.COLOR_RGBA2GRAY,
0);
let ksize =
new cv.Size(
3,
3);
// You can try more different parameters
cv.blur(src, src, ksize);
cv.threshold(src, src,
100,
255, cv.THRESH_OTSU);
let contours =
new cv.MatVector();
let contours2 =
new cv.MatVector();
let hierarchy =
new cv.Mat();
// You can try more different parameters
cv.findContours(src, contours, hierarchy, cv.RETR_TREE, cv.CHAIN_APPROX_NONE);
//轮廓筛选
let c=
0,ic=
0,area=
0;
let parentIdx = -
1;
debugger
for(
let i =
0; i< contours.size(); i++ )
{
//let hier = hierarchy.intPtr(0, i)
if (hierarchy.intPtr(
0,i)[
2] != -
1 && ic==
0)
{
parentIdx = i;
ic++;
}
else
if (hierarchy.intPtr(0,i)[2] != -1)
{
ic++;
}
else
if(hierarchy.intPtr(
0,i)[
2] == -
1)
{
ic =
0;
parentIdx = -
1;
}
//找到定位点信息
if ( ic >=
2)
{
//let cnt = matVec.get(0);
contours2.push_back(contours.get(parentIdx));
ic =
0;
parentIdx = -
1;
}
}
console.log(contours2.size());
//填充定位点
for(
let i=
0; i<contours.size(); i++)
{
let color =
new cv.Scalar(
255,
0,
0,
255);
cv.drawContours(src_clone, contours, i,color,
1);
}
cv.imshow(
'canvasOutput', src_clone);
for(
let i=
0; i<contours2.size(); i++)
{
let color =
new cv.Scalar(Math.round(Math.random() *
255), Math.round(Math.random() *
255),
Math.round(Math.random() *
255));
cv.drawContours(dst, contours2, i, color,
1);
}
cv.imshow(
'canvasOutput2', dst);
src.delete(); src_clone.delete();
dst.delete(); contours.delete(); hierarchy.delete();
};
function onOpenCvReady() {
document.getElementById(
'status').innerHTML =
'OpenCV.js is ready.';
}
</
script
>
</
body
>
</
html
>
其中绝大多数部分都和C++相似,
不同的地方已经标红。
它能够成功运行,并且得到正确的定位。(这里OpenCVJS的相关运行情况请参考官方教程)

三、研究收获
这次研究的关键节点, 是建立了Debug机制。在JS代码中加入debugger语句,并且开启F12,则在调试的过程中,可以查看各个变量的信息。

此外,非常重要的参考资料,就是OpenCV的官方教程。如果希望进一步进行研究的话,首先需要先收集掌握所有现有资料。
感谢阅读至此,希望有所帮助。
来源:oschina
链接:https://my.oschina.net/u/4330033/blog/4299676